.jpg)
开发记录(09.15-10.31)#
✅ navigation2导航定位方案测试#
🗓️2023.09.24
fast_lio/lio_sam/kiss_icp (定位算法) + dll (重定位算法) + navigation2 (导航框架)
dll算法配准效果
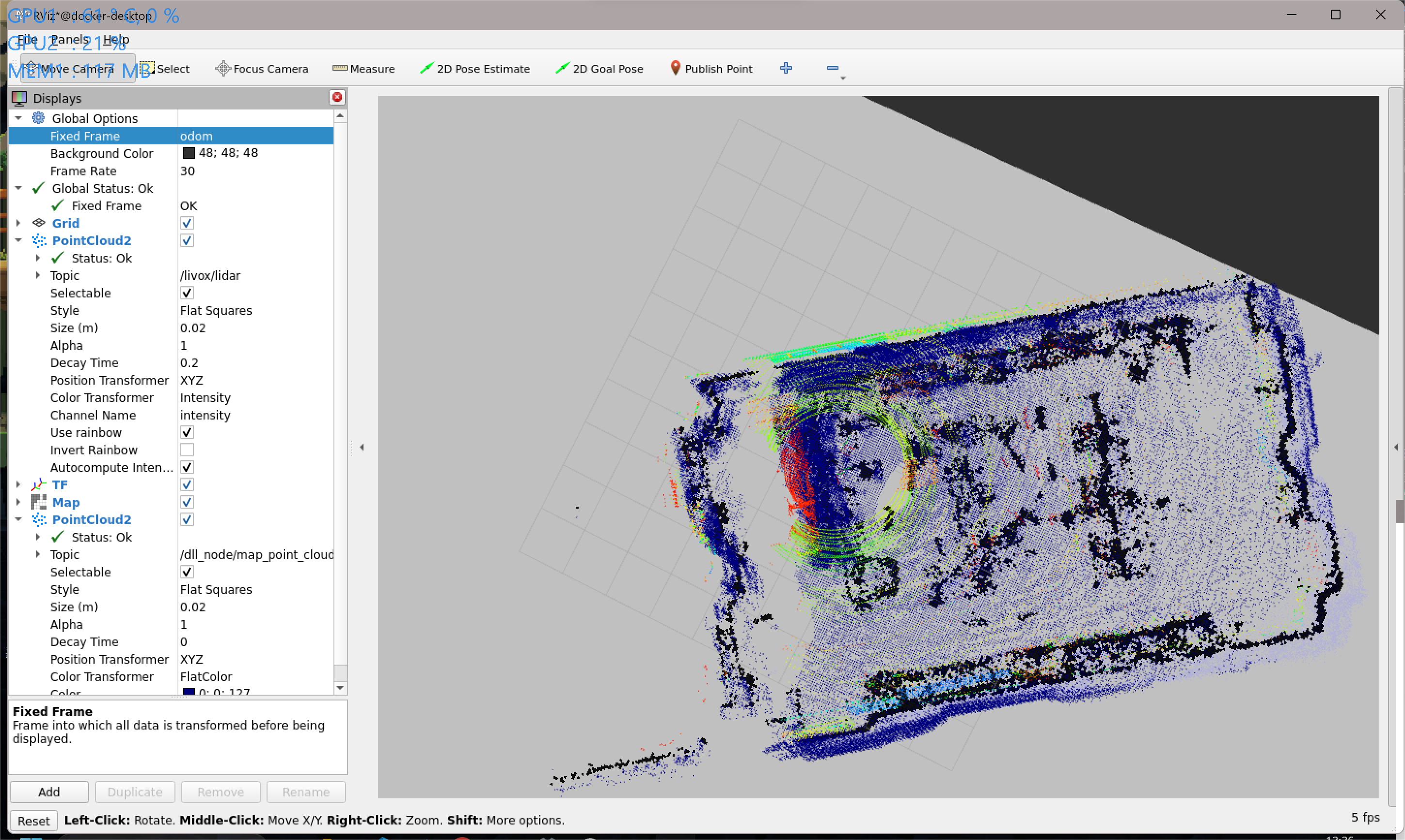
fastlio建图转八叉树地图
✅ ego_planner导航方案仿真测试#
🗓️2023.09.24
效果不佳,还需要调试。
而且为了将三维导航适用于二维,需要带上很多其他的算法包,感觉没有必要
✅ 迁移代码至ROS1#
🗓️2023.09.30
制作了镜像
用于部署在rikibot上
装车
FASTLIO_MAPPING
🟩 使用FAST_LIO_LOCALIZATION#
🗓️2023.10.01 对初始点的要求比较奇怪,配准经常失败,暂时不用这个方案
✅ Localization方案原理理解#
🗓️2023.10.02 ICP and its variants…
🗓️2023.10.03 DLL,NDT; TODO: ACML,ACML3D,EKF,UKF…
✅ git规范文档#
🗓️2023.10.06
✅ 为localPlanner[CMU]加入全向运动模型的支持#
🗓️2023.09.30
localPlanner默认是差分运动模型,依照作者描述和实际跑起来的效果,localplanner的算法优先转向再前进,并且在很多算法里都需要这种调整
用差分来控制全向也未必不行,先看效果,需要的话再加入全向
localPlanner的路径是写死的,从一开始设计就没有考虑到全向的运动模型。
解决方案:1.差分转全向 2.按照localPlanner的设计思路,重写全向的localPlanner 3.接入其他的全向localPlanner算法 4.把twowaydrive改成fourwaydriver
🗓️2023.10.09/10 仿真环境内加入了对全向运动的支持,最后是按照localPlanner的设计思路,重写了全向的localPlanner按照localPlanner的设计思路,重写全向的localPlanner
进化过程
振荡版
修正版,并且保留了原作者的一些设计思路,详见代码注释和readme
加入了全向轮的twoWayDrive控制模式,可以看到如果是后侧的点会先转向
✅ coding持续集成#
🗓️2023.09.30
教程文档在博客中更新
带有lfs管理的仓库持续集成问题会比较多,暂时还是先把大文件删除了
🗓️2023.10.03 分为开发镜像和部署镜像
🗓️2023.10.10 极客邦节点日常掉线。。。配置了更新代码自动化部署的流水线,可以将最新的代码同步并构建到用于部署的镜像上,但是由于节点掉线,无法测试,等待节点恢复后测试。
✅ 集群控制仿真环境搭建#
🗓️2023.10.16 完成搭建
✅ Docker使用文档#
🗓️2023.10.17
✅ 月结会+新规发布#
🗓️2023.10.18-21 读新规,PPT,进度规划
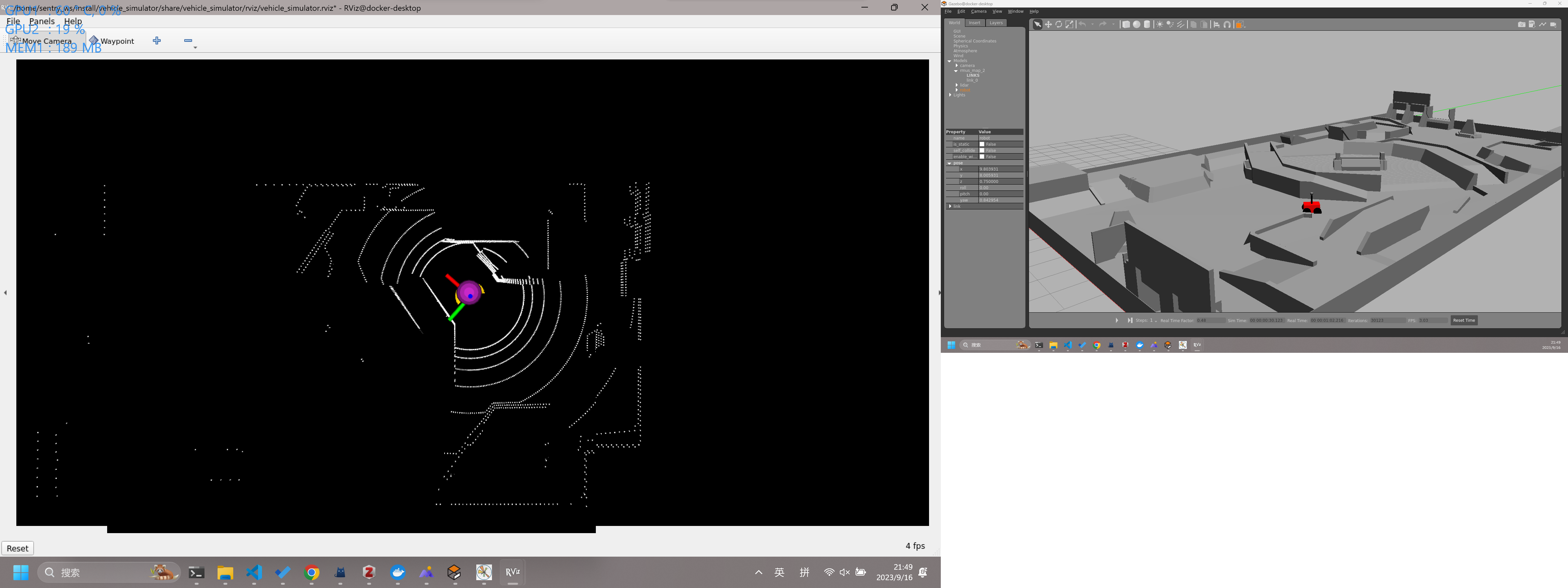
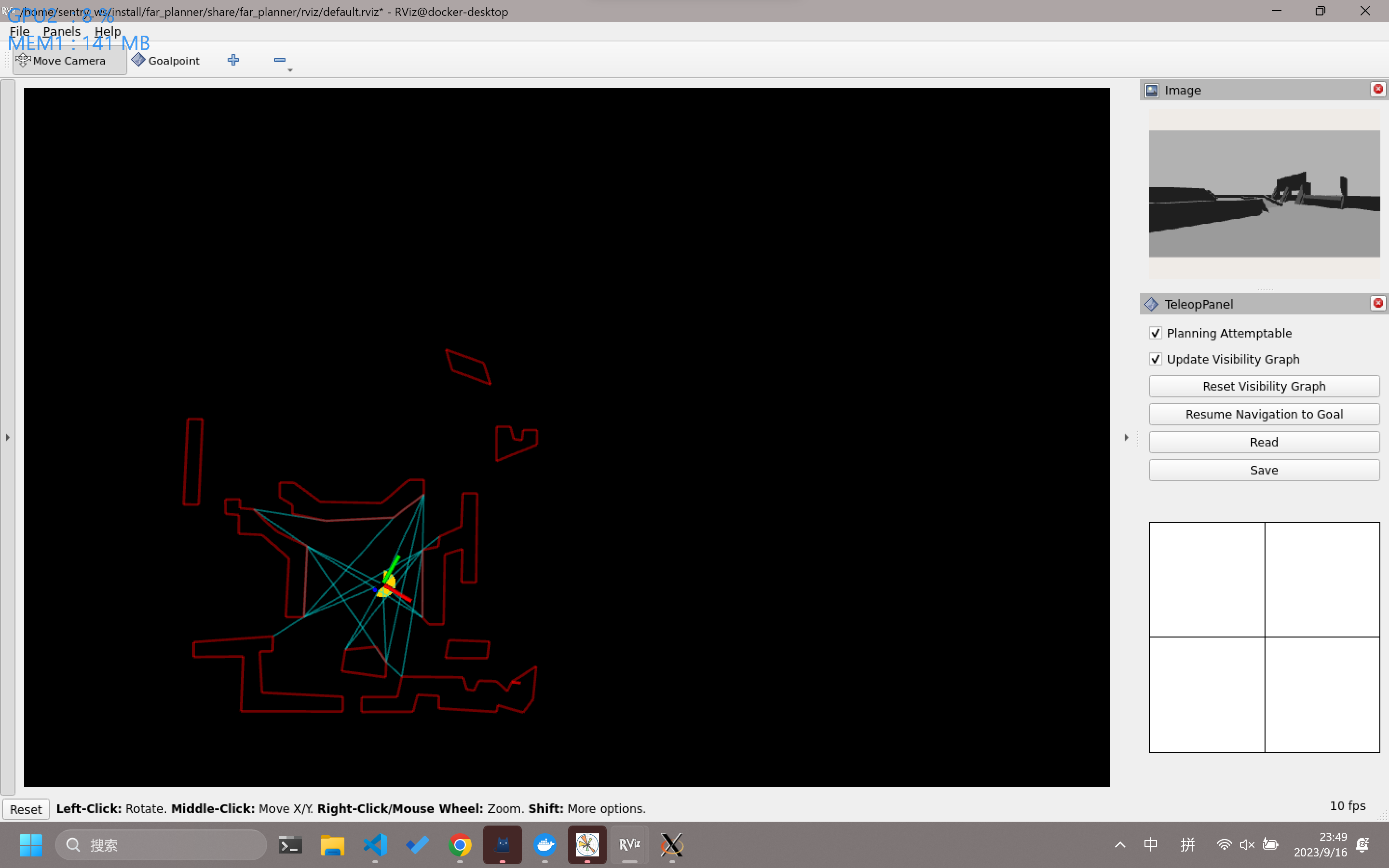
✅ far_planner导航算法仿真测试#
🗓️2023.09.24 仿真内效果很好