.jpg)
开发记录(11.01-12.31)#
✅借车#
🗓️2023.10.24-11.04 录视频、剪视频、做ppt
🟩代码理解#
🗓️2023.09.29 了解AEDE(autonomous_exploration_development_environment)框架,详见代码注释以及readme文档
🗓️2023.09.30 阅读localPlanerr[CMU]的代码,详见代码注释以及readme文档
🗓️2023.10.02/03 给代码加上了参数服务,以后可以动态调参了
🗓️2023.10.03 上坡了!!!原理详解见代码注释
🌟🌟🌟**经验之谈** 强烈推荐所有需要调参的包都加上ROS的参 数服务,示例可以在24赛季修改过的ADED包中或者pcl_cloud包中 找到。调参都在rqt_parameter_reconfigure中进行。 (对于ROS1参数服务写起来比较麻烦,懒得写了)
🗓️2023.09.29 阅读CMU导航算法系列论文,感触不深
🗓️2023.10.05-07 terrain_analysis, local_planner原理和参数理解,理解后才能修改源码,加入对全向轮的支持。
🗓️2023.10.07/08 主要在看local_planner和terrain_analysis的博客、代码和论文,详见代码注释
🗓️2023.10.24 继续看local_planner,增加了代码注释;发现local_planner在避障上做得比较粗糙,没有像nav2一样为机器人增加footprint、给地图加膨胀层。可以考虑把nav2的思想加入到local_planner中,比如模仿nav2为地图加一个膨胀层,可以用/add_obstacle话题实现(弃用)
🗓️2023.10.26 (接上)通过调参或许能实现差不多的避障效果
🗓️2023.11.10 (接上)避障也可以通过高速率的路径规划模块来实现,比如说对于far_planner这种基于可视图的导航,会将角点向外拉出半个机器人的距离,来实现避障,类似于栅格地图膨胀层的作用。再次,AEDE中的localplanner的避障是没有考虑机器人自身大小的。
✅整理代码仓库、写文档#
🗓️2023.11.11 备份、删除多余模块、整理docker制品库
✅电控联调#
🗓️2023.09.24
电控通信完成
可以使用navigation中的odometryCalibration launch测试车速执行是否如预期
实车通信测试
🗓️2023.10.10 想换老底盘,准备好了联调用的代码
🗓️2023.10.15-26 老底盘联调未完成
🗓️2023.11.11 老底盘和UA车都调通了
✅雷达倒挂的机械问题#
🗓️2023.11.14 和机械沟通了一下雷达安装的一些问题,发现机械哥并不知道雷达需要什么,所以给基本科普了一下工作原理,写了个简单的文档
🌟🌟🌟沟通很重要哇🌟🌟🌟
🗓️2023.11.15 雷达装好,真不错!

🗓️2023.11.17 雷达装在高处,底盘传上去的震动会比较大,特别是急停的时候,所以雷达内的IMU会处于一个小幅度高速震动的状态中,可能会导致FAST_LIO跑飞。加了互补滤波器以后效果好多了。后面机械上悬挂可能效果会更好。
🟩 实车测试、调参#
!!!思路是从简单到复杂一步一步调试!!!
✅ 跑通系统#
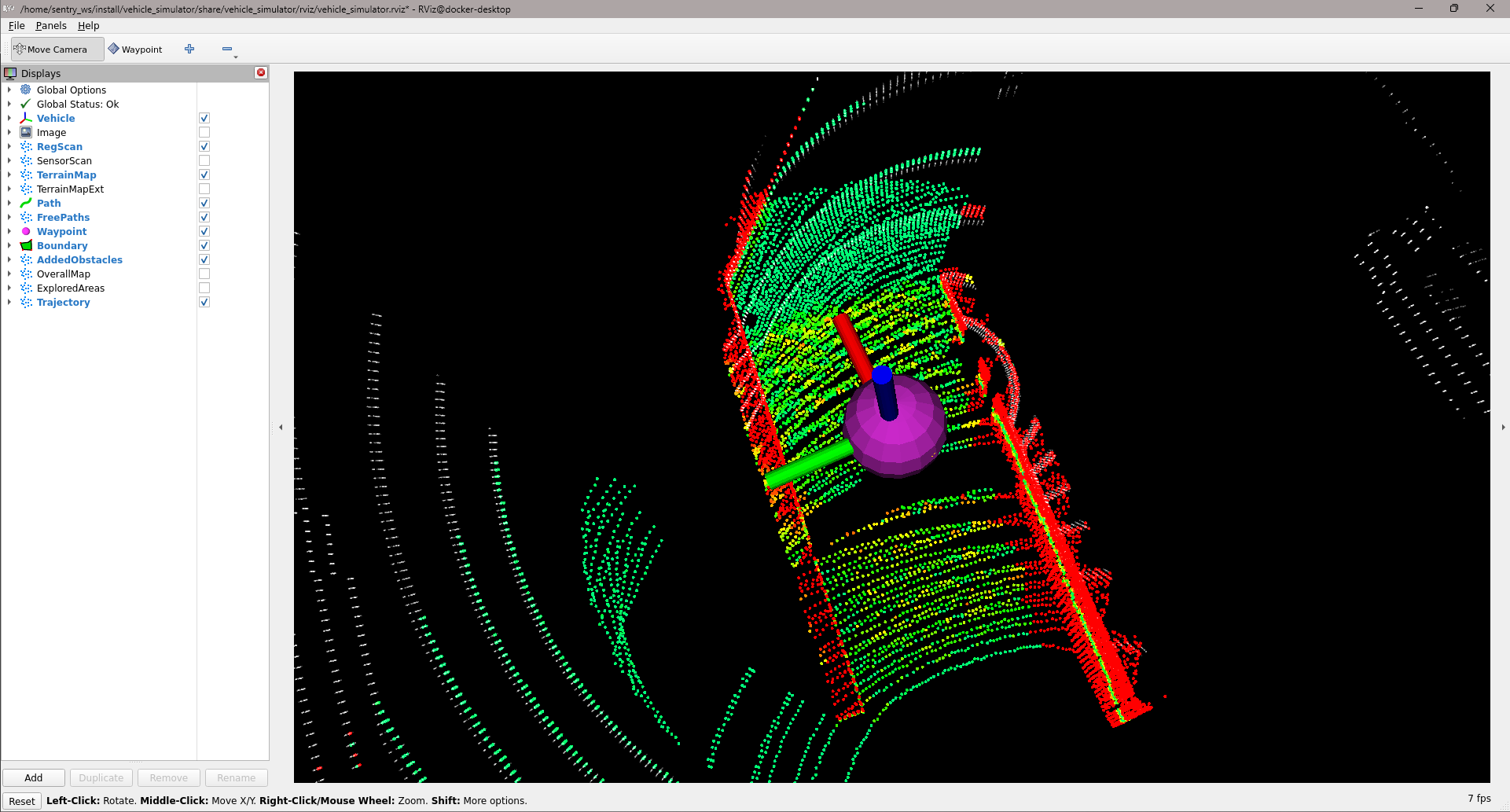
🗓️2023.10.29 FAST_LIO定位+ICP重定位+Local_Planner+Far_Planner在预先建好的可视图中导航,系统跑通
(最后导航有一点抽搐是因为local_planner的参数还没有调好)
✅定位部分:fastlio没什么大问题#
✅Controller: local planner#
🗓️2023.10.01 localPlanner原地转圈:看了社区里别人的方法,应该可以通过调大dirdiffthre来解决
🗓️2023.10.02 破案了,原地转圈是因为mid360方向装反了。
🗓️2023.10.03 实车效果也不错,速度上有高速导航的可能性
🗓️2023.10.03 对于在正左方,正右方的坐标点,运行比较别扭;与仿真内的运行情况对比,感觉问题可能是输出速度太小,电机扭矩问题造成的,车动不了。
🗓️2023.10.29 全向调通
✅Planner: far-planner#
🗓️2023.10.02 后期可以看到地图出现了一些问题,可能是因为Fast_lioZ轴飘了
✅重定位:ICP#
使用dll的话,tf树逻辑应该是这样的
fast_lio: odom->sensor
dll: sensor->map
dll对初始点的要求比较严格,icp鲁棒但是很耗算力
🗓️2023.10.25-27 测试加上DLL,效果仍然不好,非常飘
🗓️2023.10.29 发现之前的使用方式有一点问题,改正过来以后测试了ICP和DLL的重定位效果。DLL真的不如ICP吗!
__________________ DLL ____________________________ DDL+IMU ____________________________ ICP __________________
🗓️2023.11.03-05 使用ICP虽然配的准,但是速度很慢,发布tf的速率太低,估计是连5hz都达不到,达不到导航要求的消息速率,已经影响了路径追踪了。
改进方向#
1.测试FAST_LIO_LOCALIZATION 2.改变DLL的使用方式,生成的八叉树地图不应该把地板和天花板滤掉,不然会影响z轴上的定位,目前DLL会飘也可能是八叉树地图没有处理好的原因 3.Controller做得不够精致,需要改进一下
✅ 复杂路面、动态场景+其他的改进#
✅动态避障#
🗓️2023.10.21-22 效果在视频里,比较别扭,需要调参
🗓️2023.10.29 写了一个巡航的demo,用于测试动态避障,漫漫调参路😭😭😭
🗓️2023.11.05 调参不是解决问题的最终方法,决定爆改一下local_planner
🗓️2023.12.08 测试动态避障,貌似没什么问题
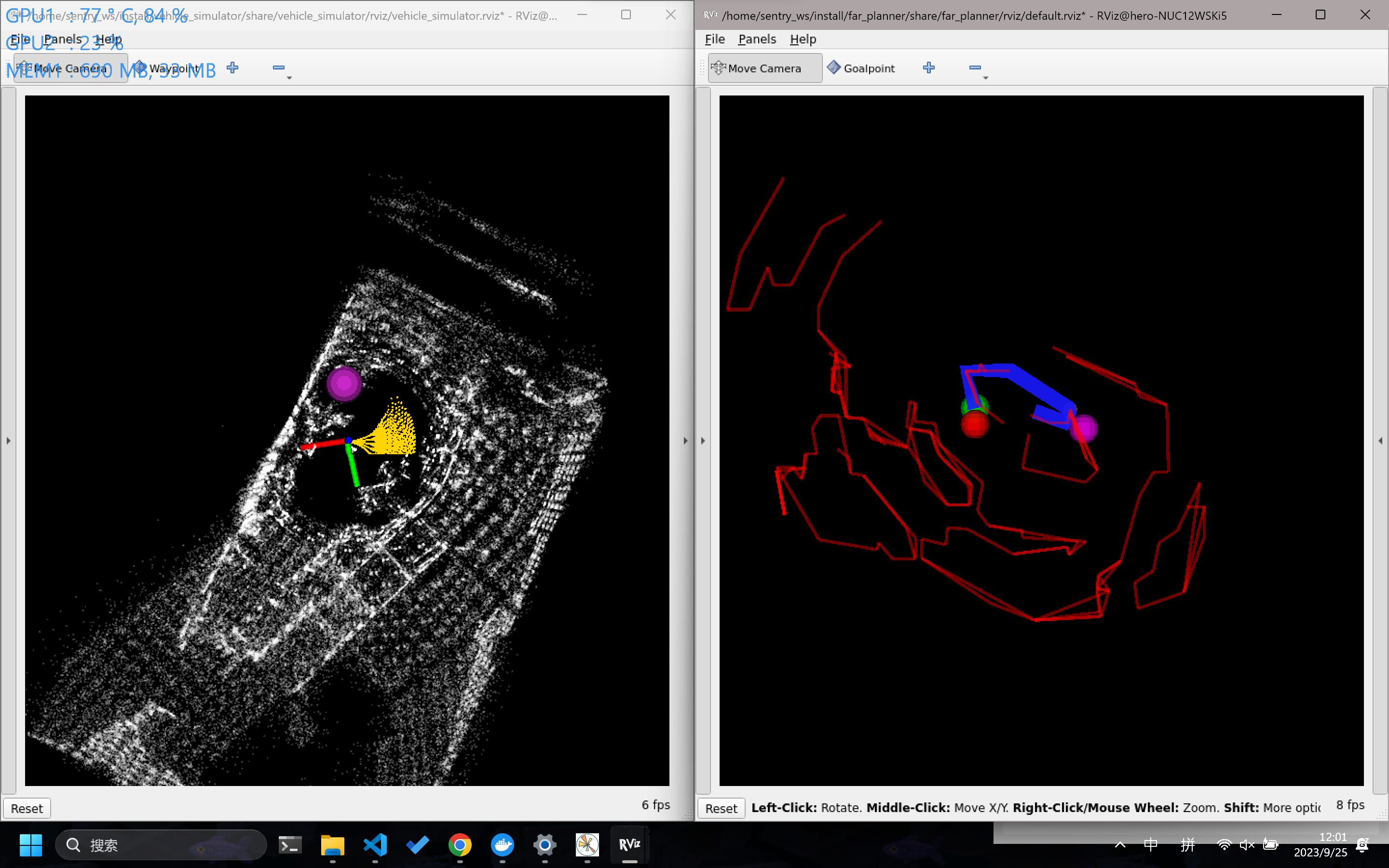
🟩狭窄通道、近距离绕过障碍物#
🗓️2023.10.25-27 实现更精细的避障,进一步理解了相关参数,编写调参记录
 可以看到在找路上花了很多时间,一旦找到了还是可以很快到达的
可以看到在找路上花了很多时间,一旦找到了还是可以很快到达的🗓️2023.10.29 通过狭窄通道+全向运动
🗓️2023.11.09 mid360扫描不到比自己低的障碍物是一个很大的问题,尽早把雷达倒挂过来测试把
🟩定位:PointLio#
雷达挂高以后,IMU抖动得比较严重,FAST_LIO跑飞的情况更容易发生了,可能是官步的悬挂不够好
🗓️2023.11.27 Point-Lio测试,🐂🐂🐂,换方案!!!
🗓️2023.11.27-12.07 迁移Point-Lio到ROS2,滤波器的更新一直有问题
🗓️2023.12.10 迁移完成!!!问题出在指针类型上,作者使用了const指针来防止指针被修改,但是在迁移的时候没有注意到这一点,用了普通指针,导致滤波器的更新出现了问题。
关于ROS1 const指针的一些说明what-is-constptr
官方的指针说明Pointer types
✅地形分析与上坡#
🗓️2023.11.03 小车成功上15°坡面
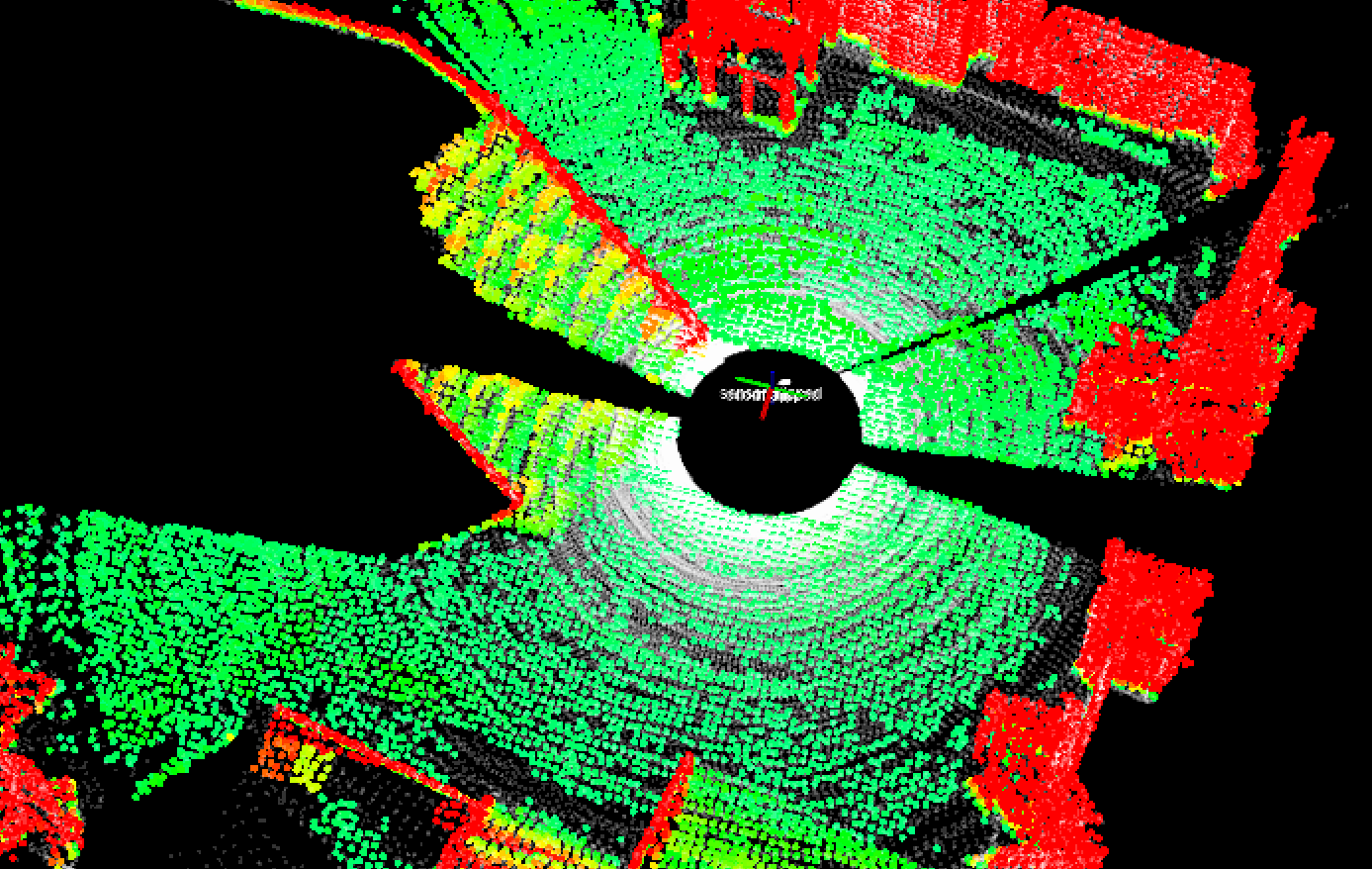
🗓️2023.10.21 terrain_analysis中裁剪掉车体内的点云
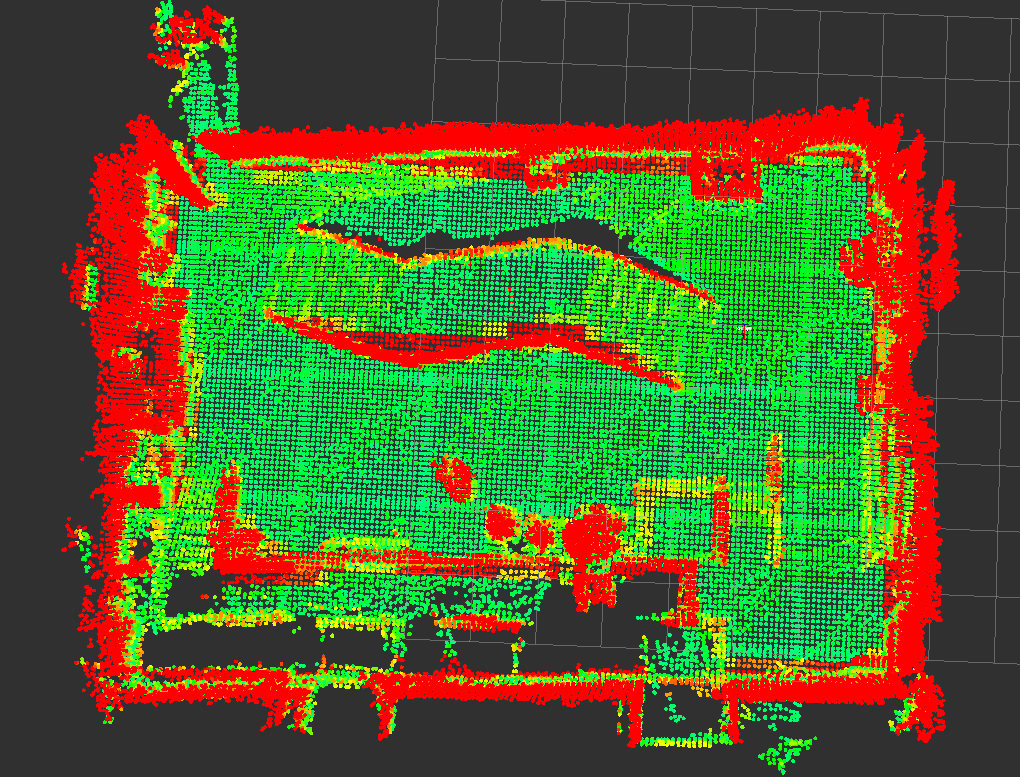
🗓️2023.11.15-18 可以把点云放到CloudCompare中进行滤波,得到一个理想的点云再导入系统中处理,主要是用到这两个工具:
SOR滤波(Statistical Outlier Removal):Tools->clean->SOR filter,对离群点进行滤波
分割:Tools->Segmentation->Label Connected Components,如果有比较大块的离群点,可以用这个分割出来,然后删除
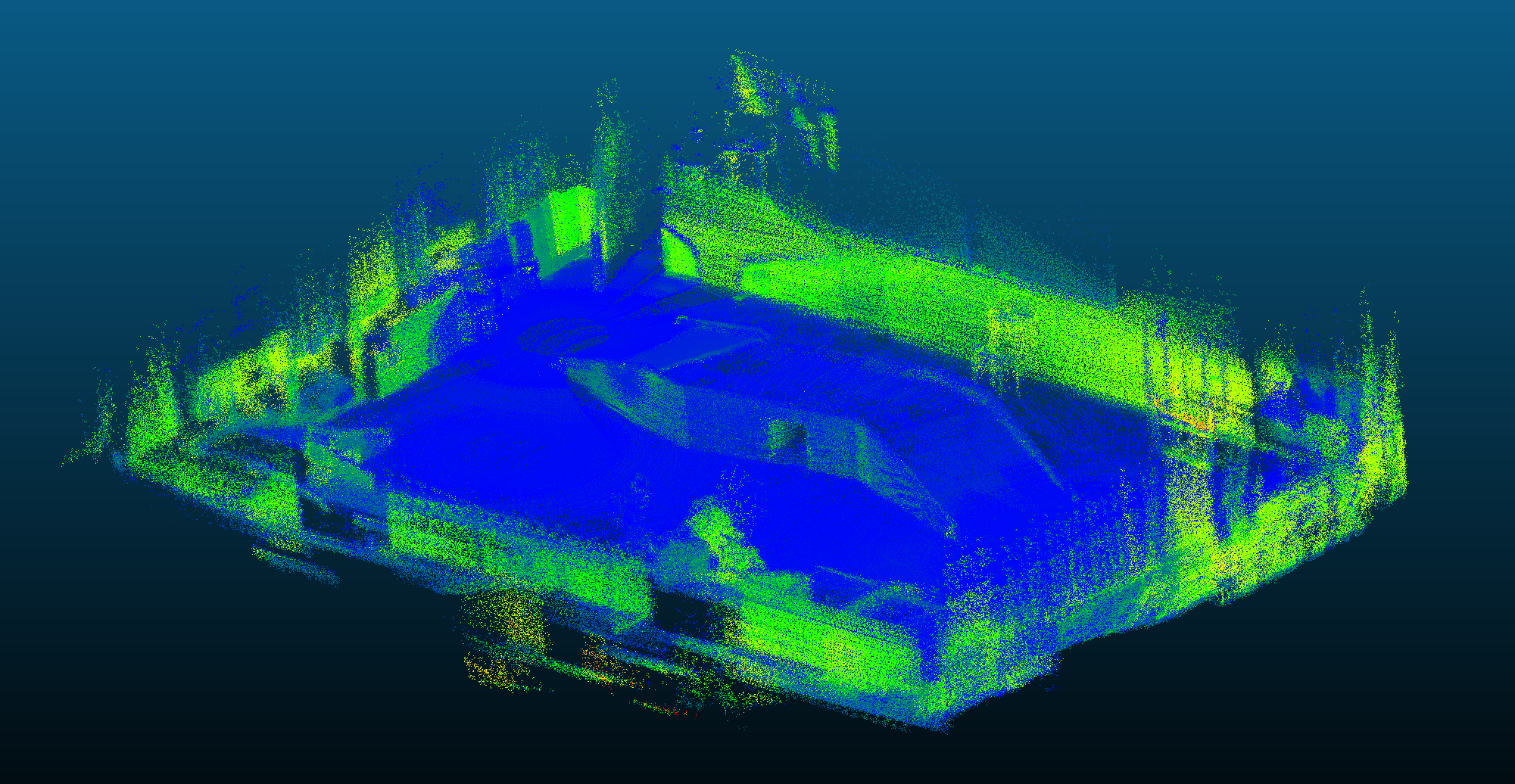
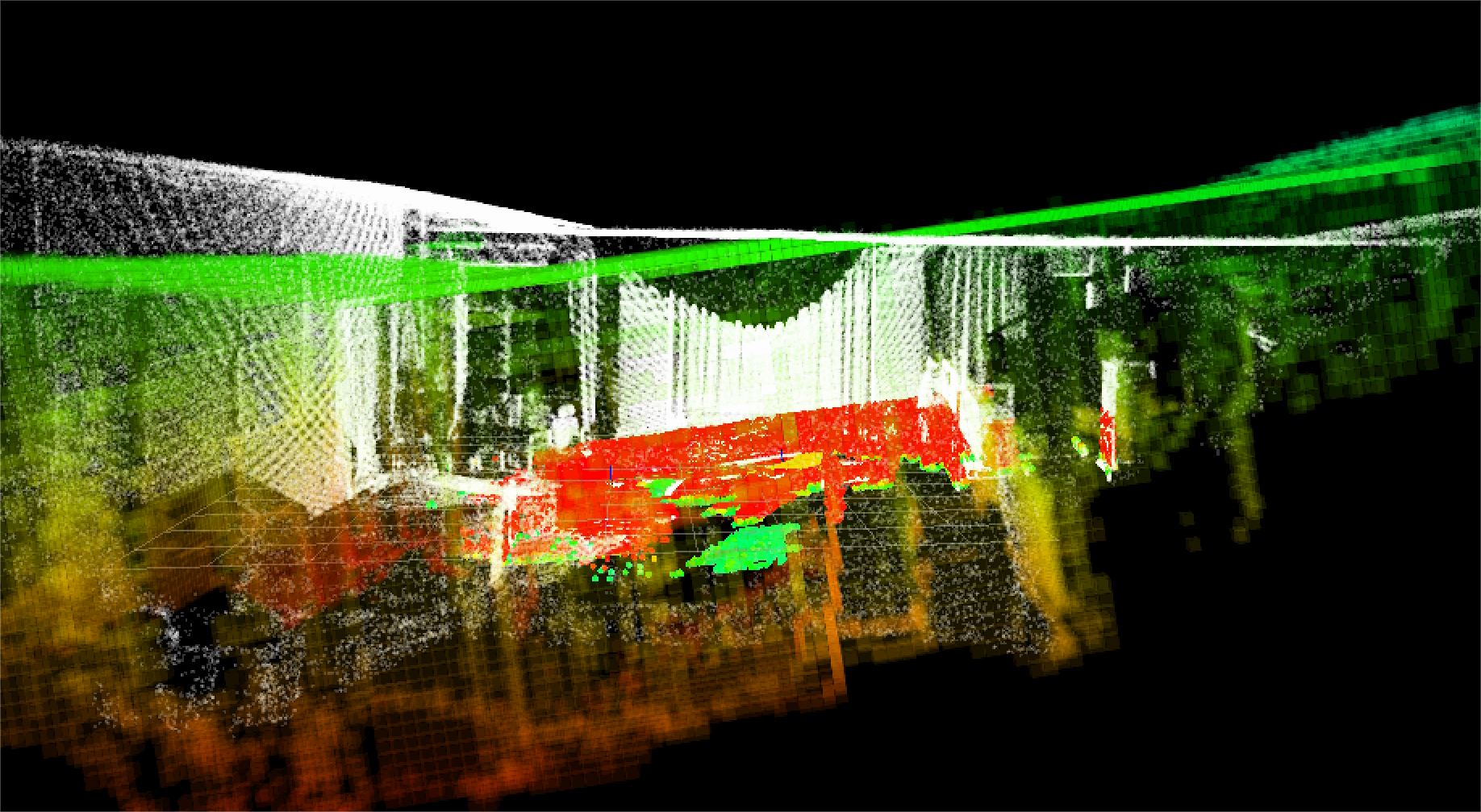
🗓️2023.11.15-18 将terrain_analysis_ext做成离线的了,一方面减轻实时运行的负担,一方面保证稳定性,还可以离线处理点云,查看visiblity graph的构建效果。
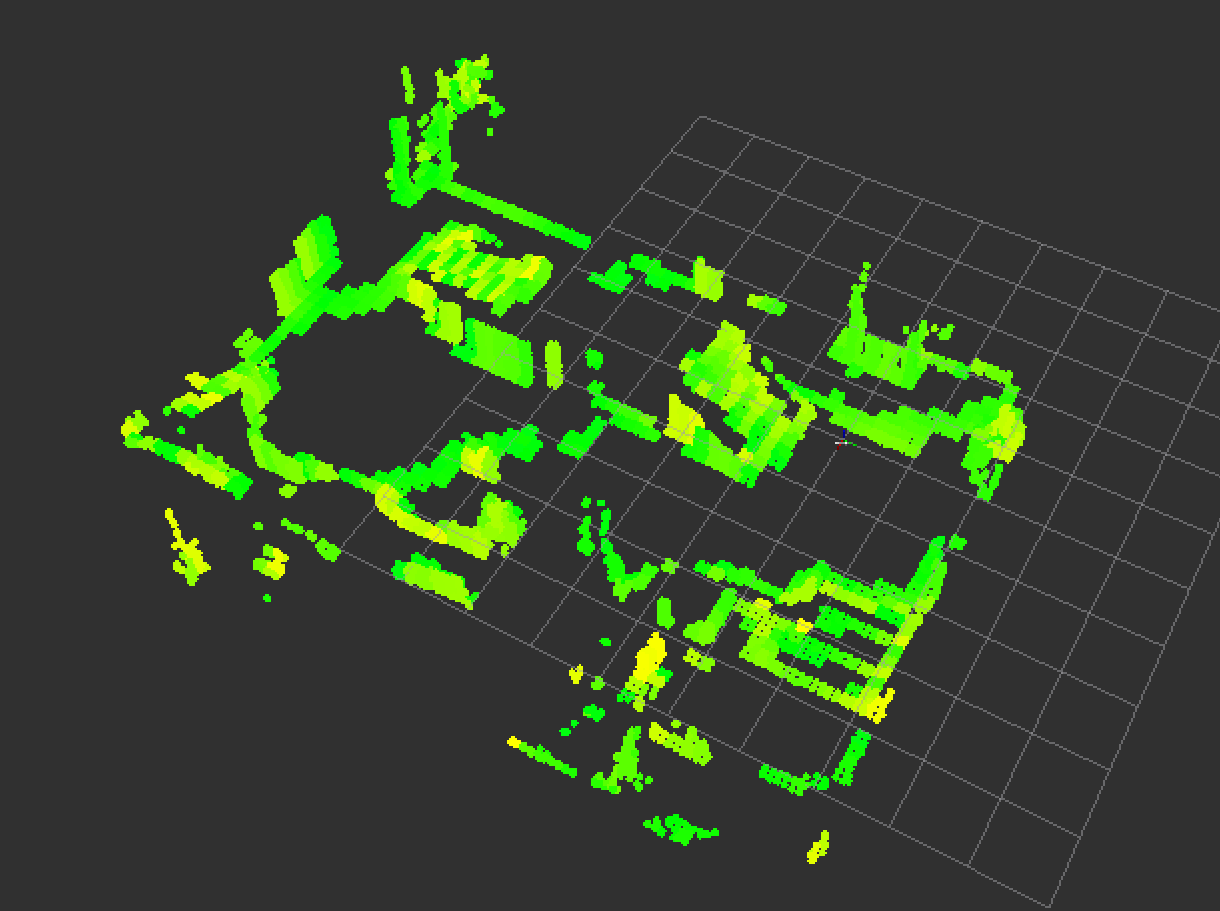
发现两个需要改进的问题:
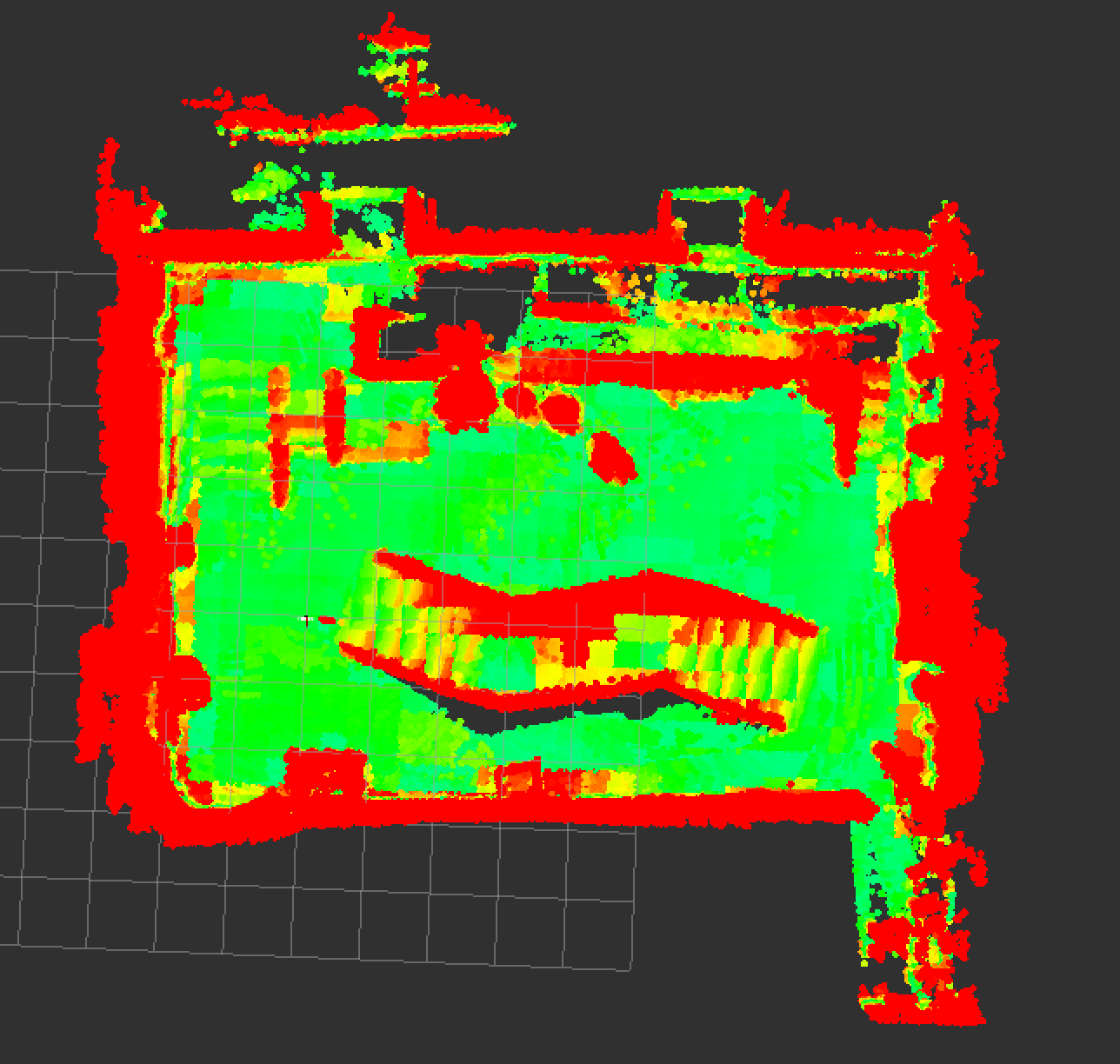
可以看到有一些很薄的墙壁无法被构建出来,terrain_analysis是有正确识别的但可视图中却没有,很可能是far_planner在对点云进行滤波的时候把这些点滤掉了,后面需要改一下点云转图像然后图像处理的部分。
terrain_analysis_ext的分析效果没有terrain_analysis好,可以看到在上坡的地方有锯齿出现,后面需要改一下terrain_analysis_ext的代码,或者直接用terrain_analysis的代码。
🗓️2023.11.18 为FAST_LIO加入裁剪点云功能,以去除车体内的点云,不然建出来的图里面会有车子经过的轨迹
🗓️2023.11.24 terrain_analysis_ext改进(接上上)
terrain_analysis和terrain_analysis_ext有不同的超参数,terrain_analysis_ext中的体素格更大,分析得也就比较粗糙,导致了锯齿的出现,改了一下超参就好了。
调参以后far_planner中还是不能很好的提取多边形。可以看到在对点云进行图形学处理的时候,是只有左图中红色的部分会被放进去处理。对于矮小的墙壁,加上只扫描了一个面,点云的数量就太少了,再模糊一下,处理一下,几乎就没有了。

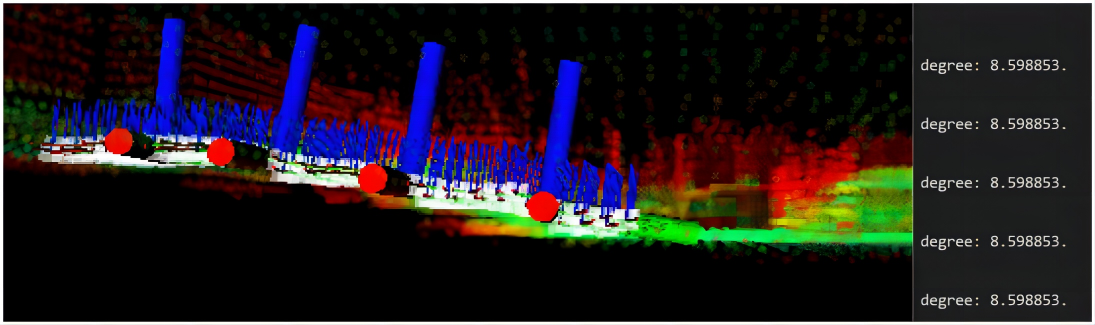
🗓️2023.11.27 对于更加陡峭的坡面,如果不调整上坡的角度,可能会出现车轮悬空的情况,所以还是要进行一下坡面的分析
❌第一个想法是将开启use_sorting和不开启use_sorting的分析结果相减,获得坡面的点云。效果并不好。
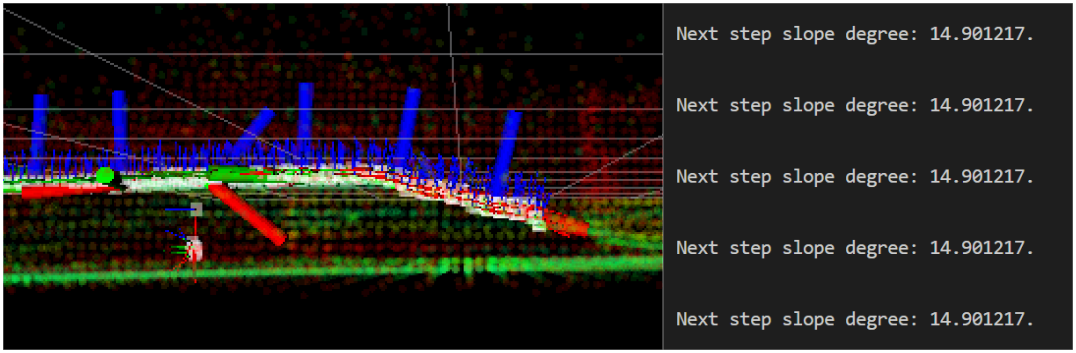
✔️第二个想法是计算路径内点云的法线
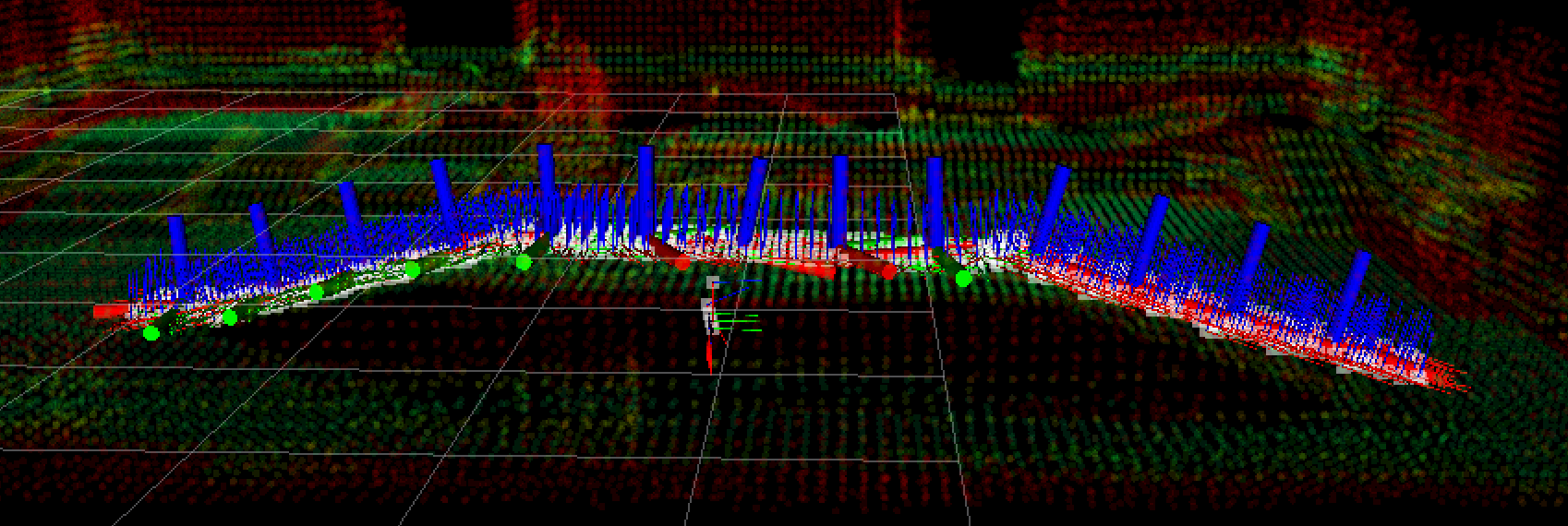
得到了对应的坡度,还是比较准确的。(对于离群点需要滤波,不然会干扰分析)
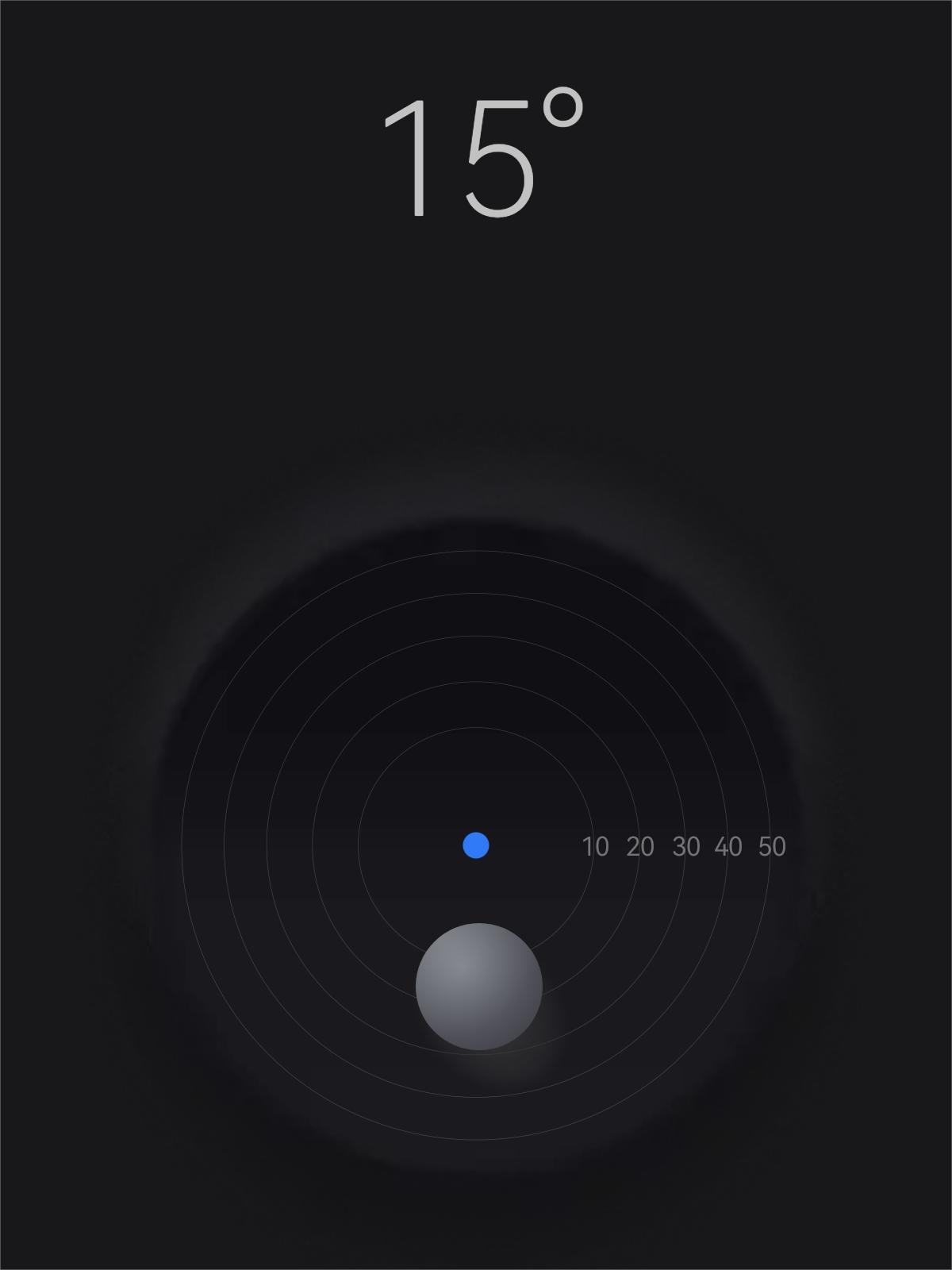
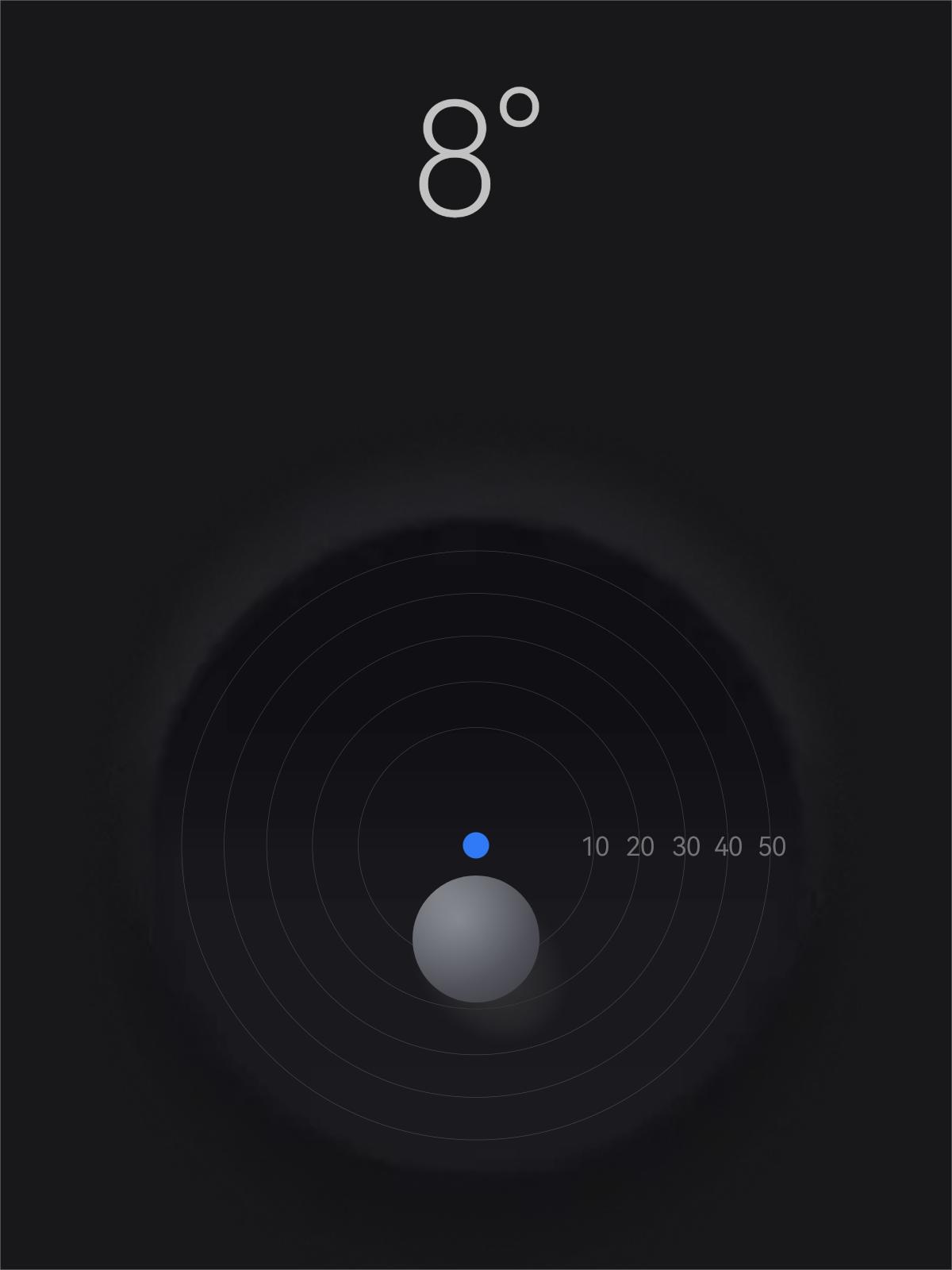
🗓️2023.11.27 哨兵会调整角度上坡啦!
✅重定位与上坡: DLL#
🗓️2023.11.06-09 测试FAST_LIO_LOCALIZATION 还是没有成功,怎么给初始点都不对。
🗓️2023.11.06-09 给DLL做定位的八叉树地图留下天花板以后,z轴不怎么飘了,跑得也挺稳的。请教了顾昊,说是DLL很迷,建议使用ICP或NDT,但根据DLL的论文所述以及实际的测试,ICP更耗算力。在DLL还没出问题之前还是优先DLL把。
🗓️2023.11.09 发现DLL在上坡的时候会出现pitch对不上的问题,会导致提供给导航的里程计信息有错,这和DLL使用了imu数据做roll和pitch的计算有关。顾昊的建议是给imu数据加上互补滤波,然后在dll中将use_imu设为true,(可能还要调一下use_increasement?)。但是发现把use_imu设置为false以后(也就是使用fastlio发布的tf来做roll和pitch的计算),问题也解决了。
🗓️2023.11.18-20 在小车上测试的时候用的是原版ROS1的DLL,使用方法正确以后效果是很不错的。但是使用了TUP开源的DLL以后就开始出现问题,怀疑是迁移没做好,就自己迁移了,感觉恢复了DLL在ROS1的荣光!
✅雷达倒挂的问题#
🗓️2023.11.16 雷达倒挂后确实出现了一些问题,龙sir留下来的代码有一些bug,tf的发布有问题,导致了坐标系的抽搐(非常感谢顾昊大佬的关心🌹🌹🌹)

关于地图反过来和tf树的一些问题:
livox_ros_driver2的问题:把雷达倒挂过来,livox_ros_driver发布出来的点云居然没有倒过来,不知道是不是算法对点云做了什么处理
反过来的地图:因此产生的问题就是fast_lio建出来的地图是反的。因为fast_lio将odom和camera_init初始化在同一点。解决的方法是让fast_lio和livox_ros_driver2在odom_flipped和sensor_flipped坐标系下工作,再增加两个sensor到sensor_flipped和odom_flipped的tf树,这样就可以得到正向的tf树了。
Computational Cost:需要注意的是,如此,fast_lio发布的点云数据就是在odom_flipped坐标系下的了(cloud_registered_body在sensor_flipped坐标系下),如果后面的模块对数据的frame_id有要求,需要做相应的修改,并且要注意相应产生的计算消耗,因为有可能会为了把点云转到必要的坐标系而进行太多的点云遍历,导致计算量过大。
TF Tree:tf2_ros的static_transform_publisher有一些神奇的特性,明明发布了坐标系,但是就是不工作,tf树连不起来。有可能是frame_id和child_frame_id写反了,改过来也许就能解决问题,但还不知道是为什么。(就比如说fast_lio发布odom_flipped到sensor_flipped的变换,一个static_transform_publisher发布–frame-id odom –child-frame-id odom_flipped –qx 1.0 –qw 0.0,另一个static_transform_publisher发布–frame-id sensor –child-frame-id sensor_flipped –qx 1.0 –qw 0.0,就会出现tf树连不上的问题,但是把sensor和sensor_flipped换一下位置,问题就解决了,好像有点道理,但不知道为什么)
🟩 哨兵决策#
🗓️2023.10.21-22 迁移代码、决策接口、GUI
🗓️2023.11.05 改进决策模块,联盟赛用的行为树写了个基本的demo
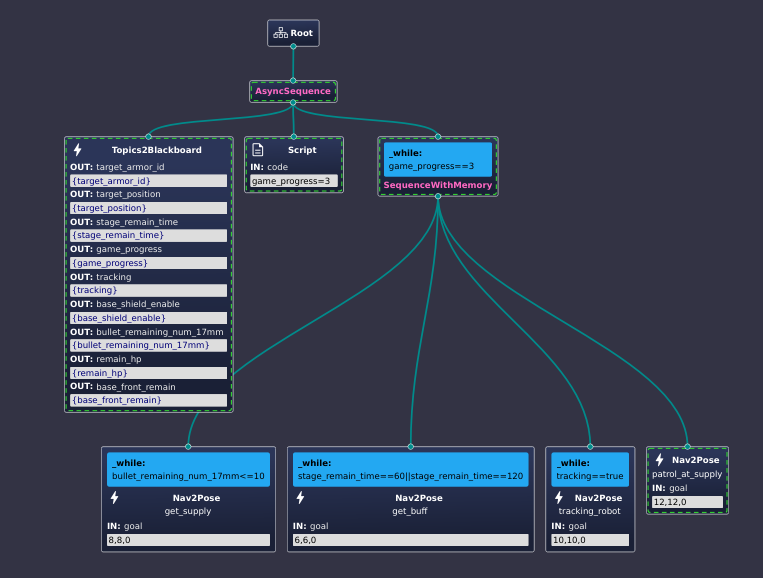
🗓️2023.11.22 导航接入决策,巡航DEMO跑通
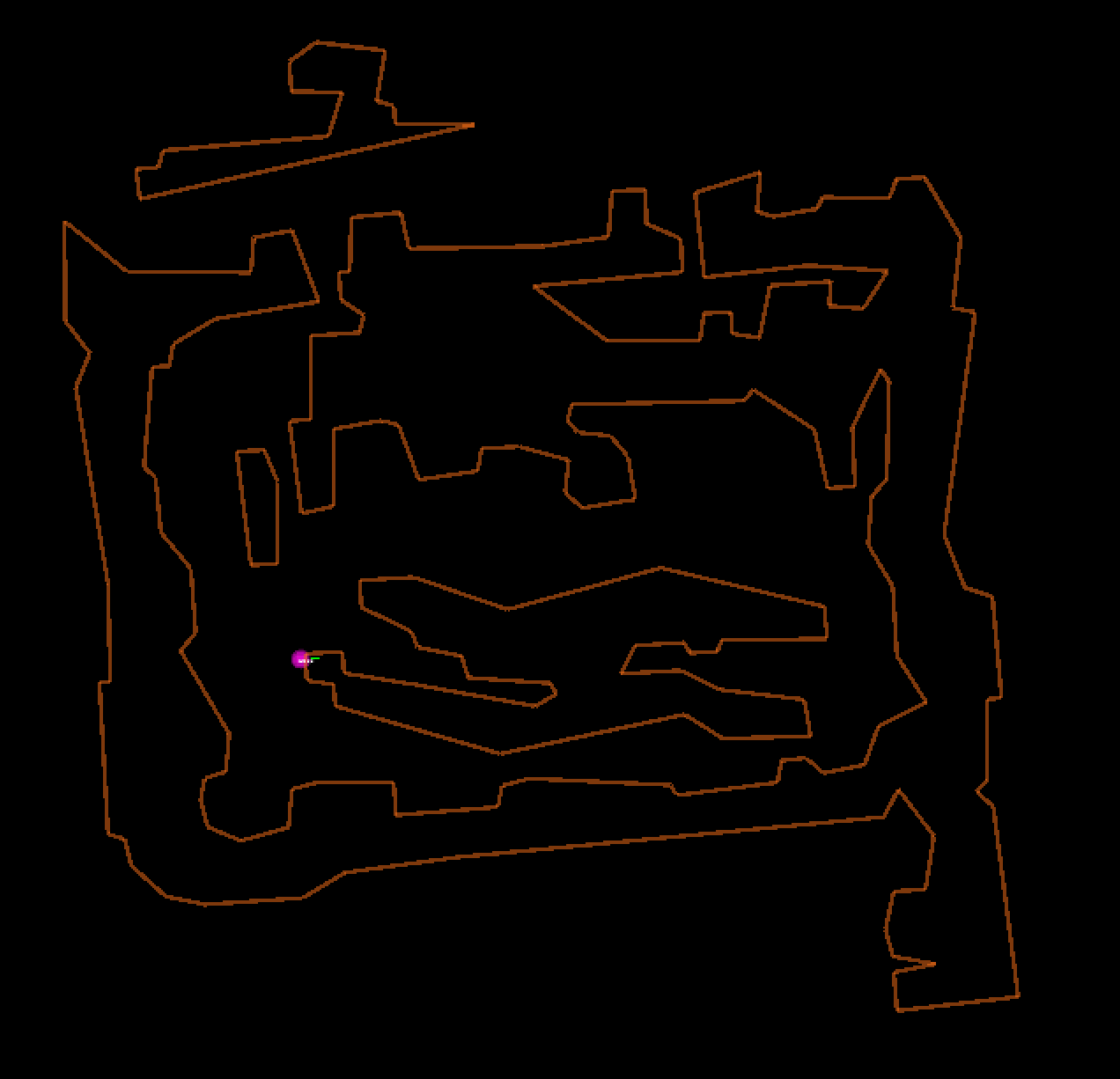
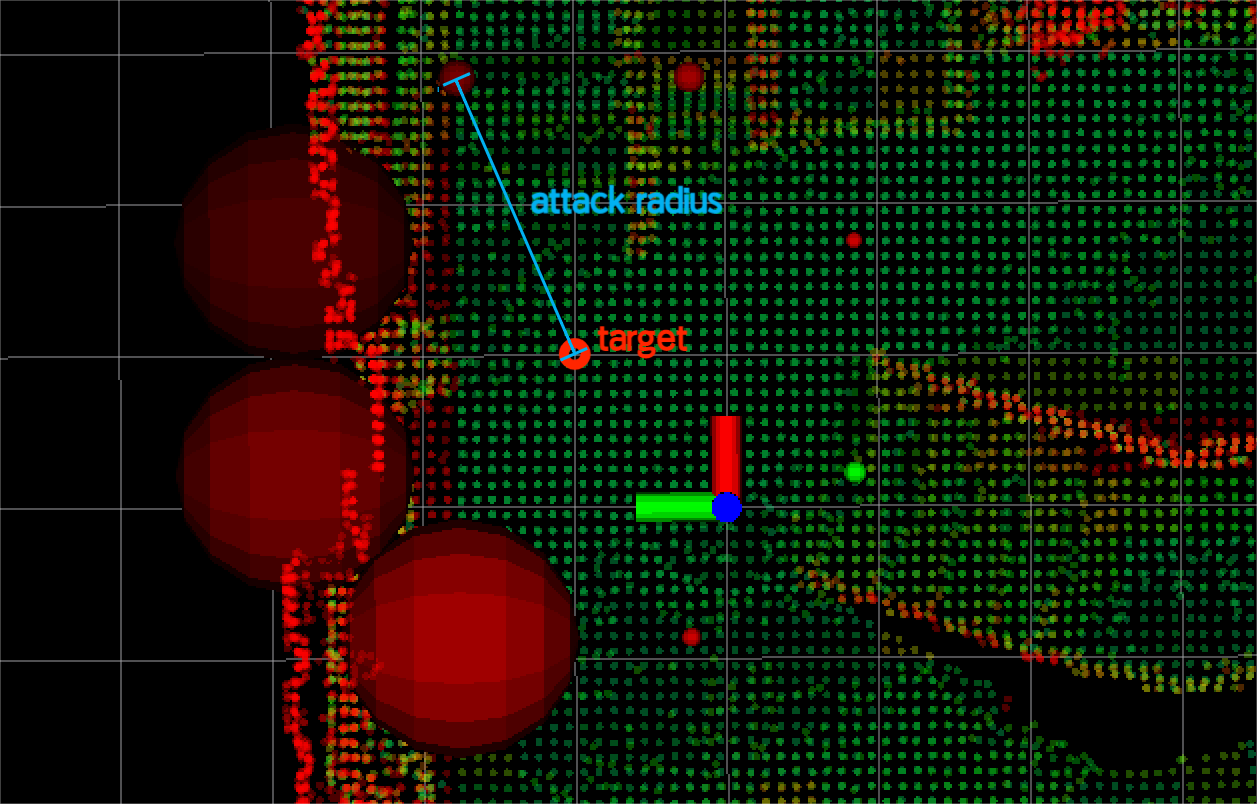
🗓️2023.12.1 追击节点开发
假定目标在(1,1),红色的点是备选攻击点。颜色越浅,距离哨兵越近;点越小,这一点到目标的直线路径上障碍物越少。最终选取的攻击点如图绿色点所示。
🗓️2023.12.09 联盟赛决策基本开发完成,在仿真中通过测试
✅赛季规划#
🗓️2023.10.28-29