.jpg)
开发记录 2024.01.01-now#
框架融合#
从两个框架里各取所需hhh
terrain_analysis+costmap_2d+NavfnPlanner+local_planner
local_planner和nav2的融合问题
原先CMU的框架中,planner发布的是一个个目标点,这些目标点在转角的地方会有分布,local_planner会根据这些目标点进行规划
但是nav2中的planner发布的是路径,是由很多的目标点组成的,怎么把这么多的目标点转换成适用于local_planner的目标点就是一个问题了。
而且MPPI Controller挺好用的,别人什么都写好了,懒
重定位小工具#
搞个重定位的小工具试试
不太好用,暂时弃了hhh
总结一下最近的进度2024.01.12#
定位部分#
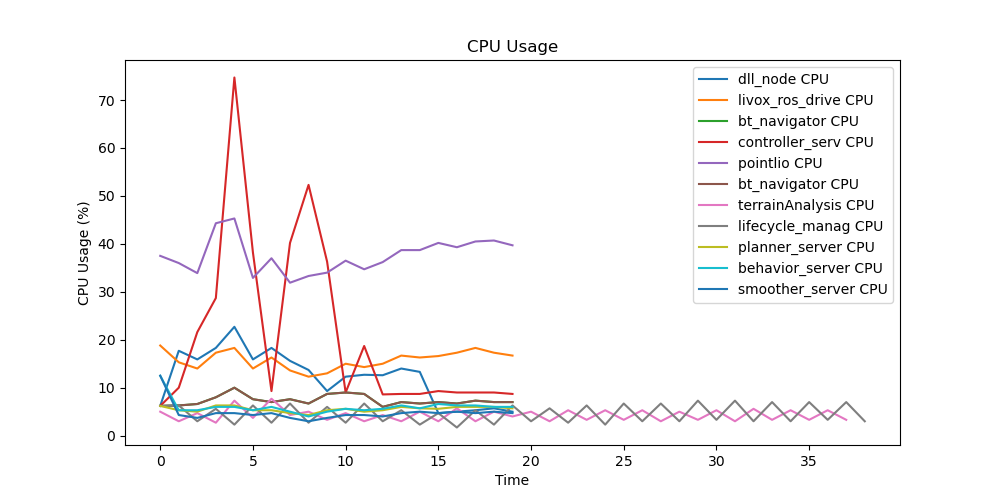
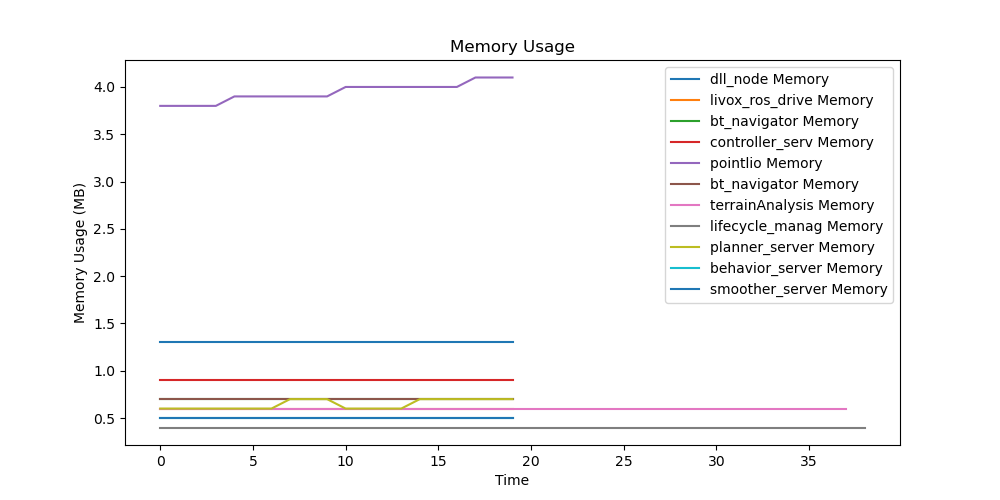
Point_lio比Fast_lio稳很多,占用率也是OK的,所以就用Point_lio了。虽然偶尔还是会飘,只要导航不要醉酒式开车基本上不会出问题。
Point_lio又有了最新的更新,也一并做了迁移,但是还没发现效果好在哪
Point_lio推荐了使用Li_init进行激光雷达和imu的标定,使用之前可以标定一下
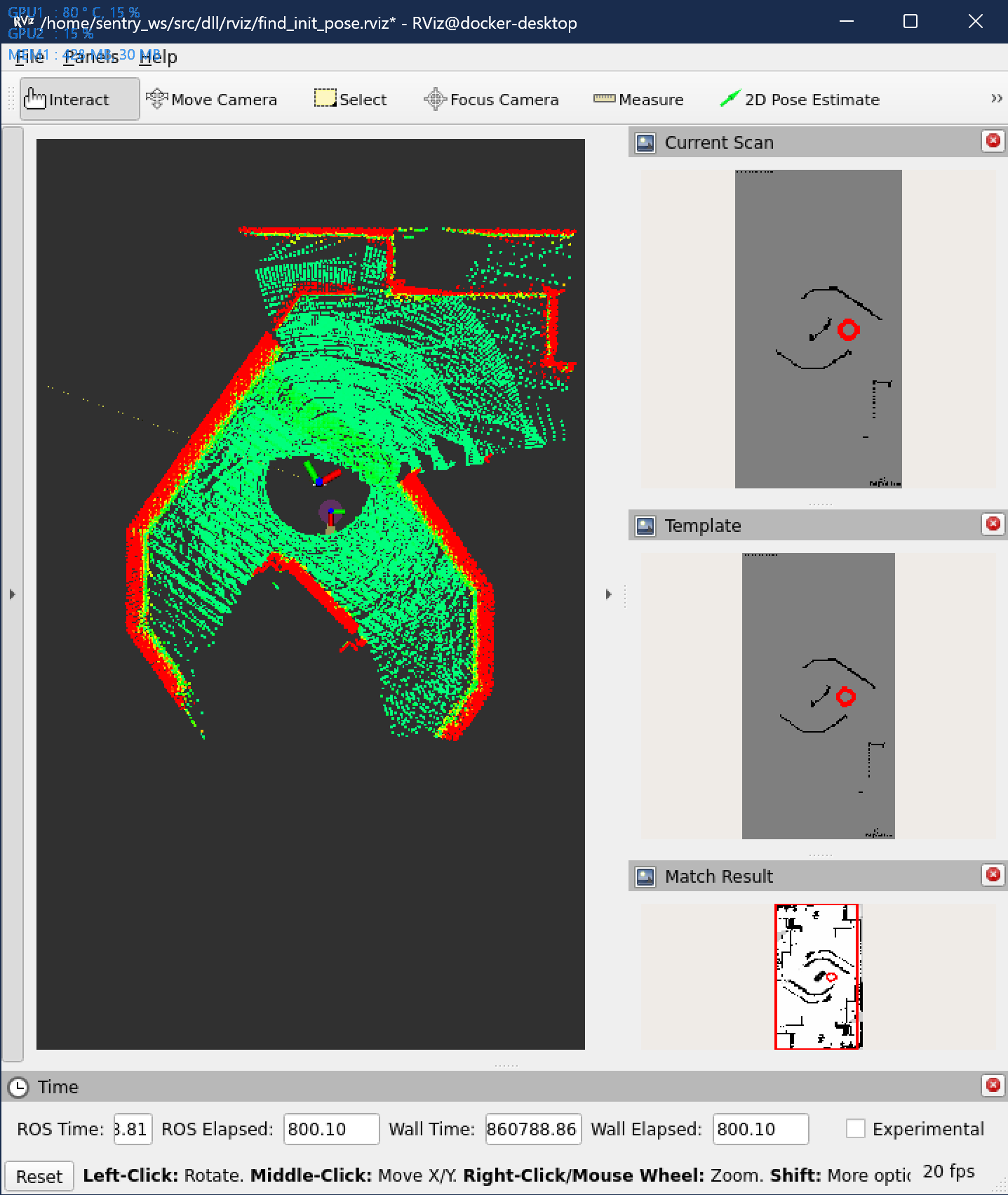
重定位部分#
DLL和Point_lio一起使用貌似有一点问题,不知道是不是Point_lio发布消息的速率太高了,原本用于Fast_lio的参数不适用了。还需要再调参试试看。
还找了另外一个类似于DLL的点云配准算法,mcl3d,和DLL优化的对象相同但是方法不一样,用的是高斯牛顿,效果等待测试。
2024.02.02 mcl3d的效果不太好,DLL在高速的情况下也不太稳,兜兜转转还得是ICP。ICP占用率太高的话可以检查一下建八叉树地图的时候的分辨率,这次只是把分辨率从0.1调到了0.15,运行就顺畅了很多。(可以同时运行两个Octomap_server,一个低分辨率用于建八叉树地图,给重定位用;一个高分辨率用于建投影2D地图,给导航用)
导航部分#
global planner#
Nav2默认的算法感觉够用了,不是说算法有多高级,但是工程化和优化做得真不错。
local planner#
local_planner其实还是会有一些jitter的问题,跑起来很不优雅,对定位也不友好。再加上如果要和Nav2框架融合还没做,所以先暂缓把。
MPPI Controller路径很平滑,20hz的规划频率算力也跟得上,打算先用这个了。
而且Nav2的避障很精细啊,总结来说比我开得好多了
决策部分#
决策稍微改了一下来适应Navigation2的框架,Nav2的框架真的太成熟了,很多东西都不用自己写了,直接用就可以
跟BehaviorTree.CPP申请到了一年的Pro版本使用权
复杂地形#
terrain analysis#
写了两个Nav2 Costmap 2D Plugin把terrain analysis接入了Nav2。
下楼梯#
主要是3个问题:
楼梯的辨识
对准的问题
单向通行:只能下楼梯不能上楼梯,地图需要防止逆向的路径生成。写了一个Nav2 Costmap 2D的Dynamic Layer,和Binary Layer结合起来可以实现动态地堵上某些通道。
上坡和下楼梯的时候需要临时加速。这个部分通过修改Nav2的velocity_smoother实现。将速度需要放大的倍率通过话题发布即可。
路径法线分析对稠密的点云效果比较好,虽然可以在线运行(也就是用SLAM实时发出的点云),但是效果不太好,容易算错角度。所以还是用离线的点云地图来做这个部分。
Nav2优化#
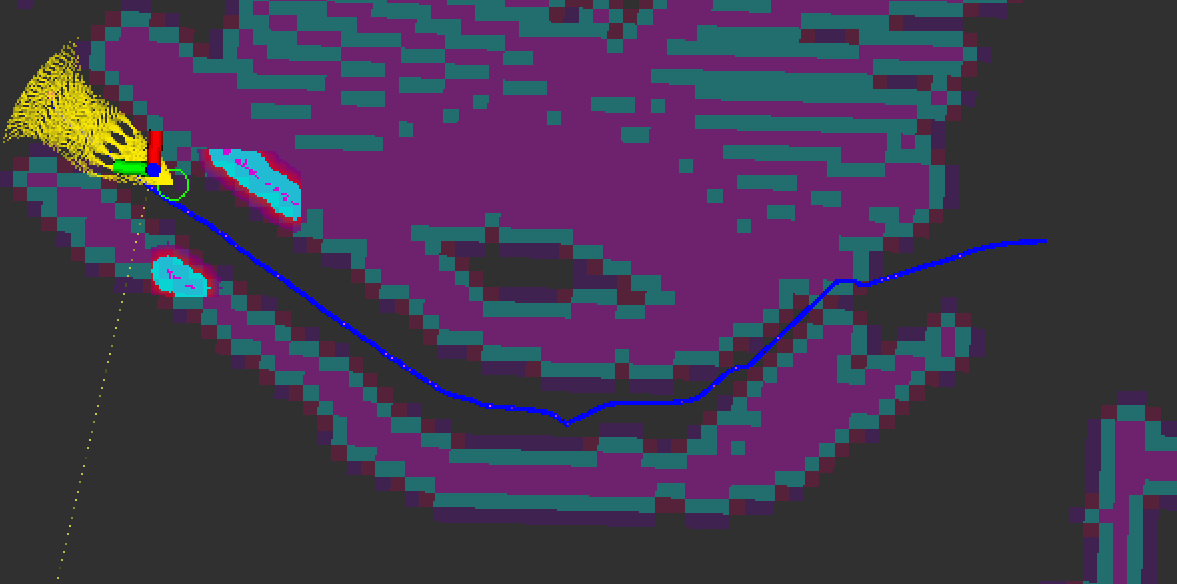
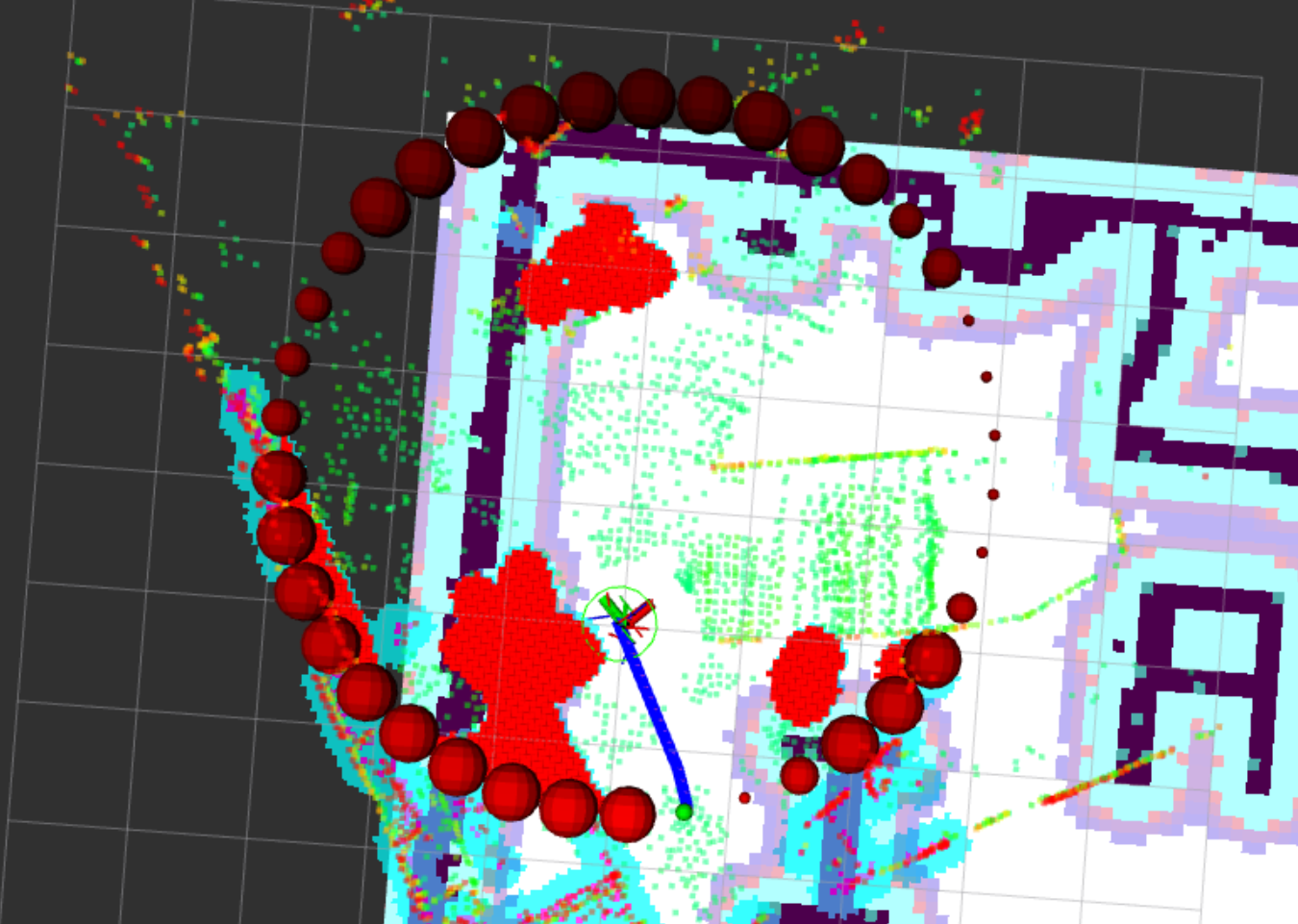
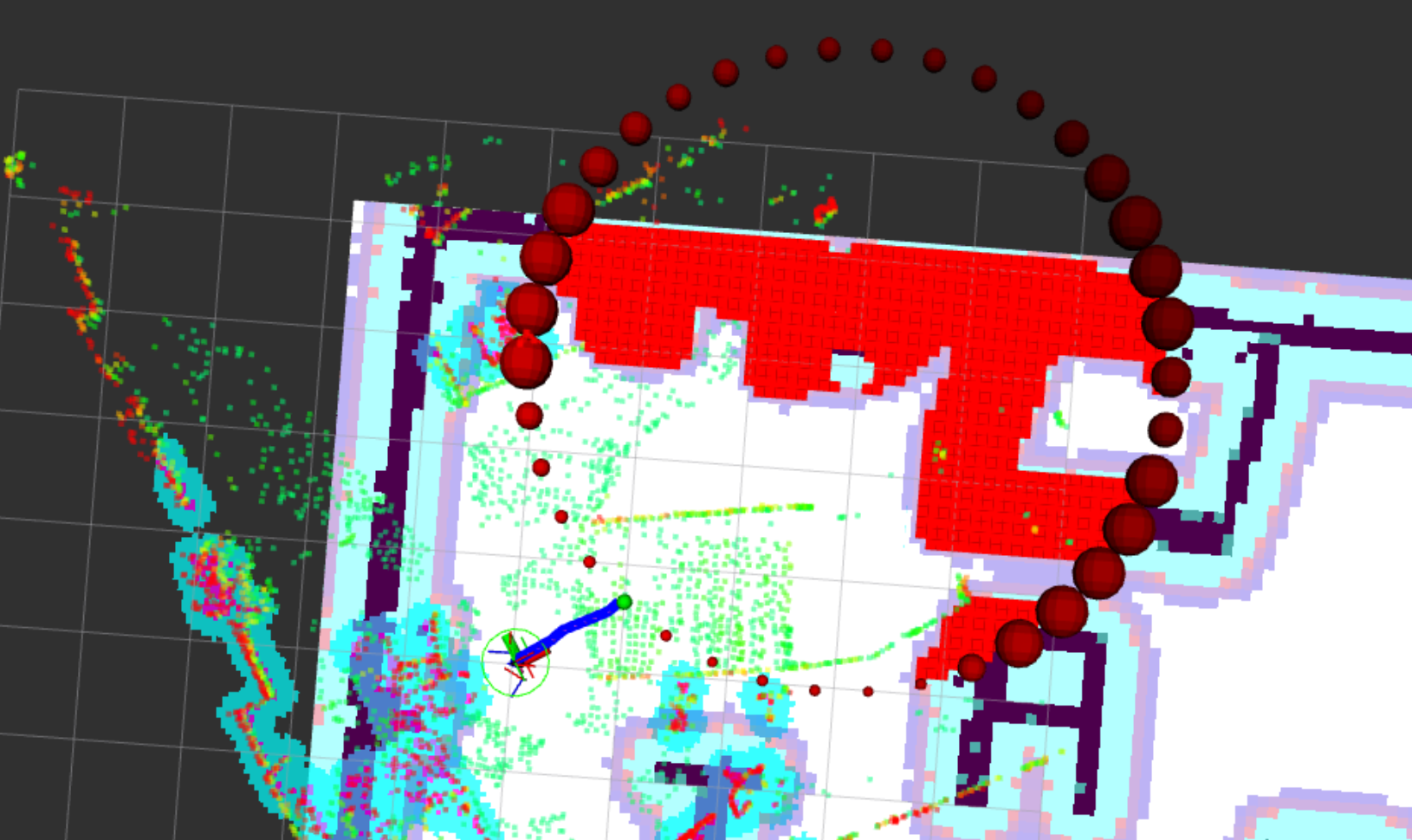
卡在costmap中无法移动的问题#
之前的backup行为很傻,胡乱后退。现在改写成了先找到free space,朝着free space的方向移动。如图,疯狂逃避inflation layer。
红色点是free_space,绿色点是目标点
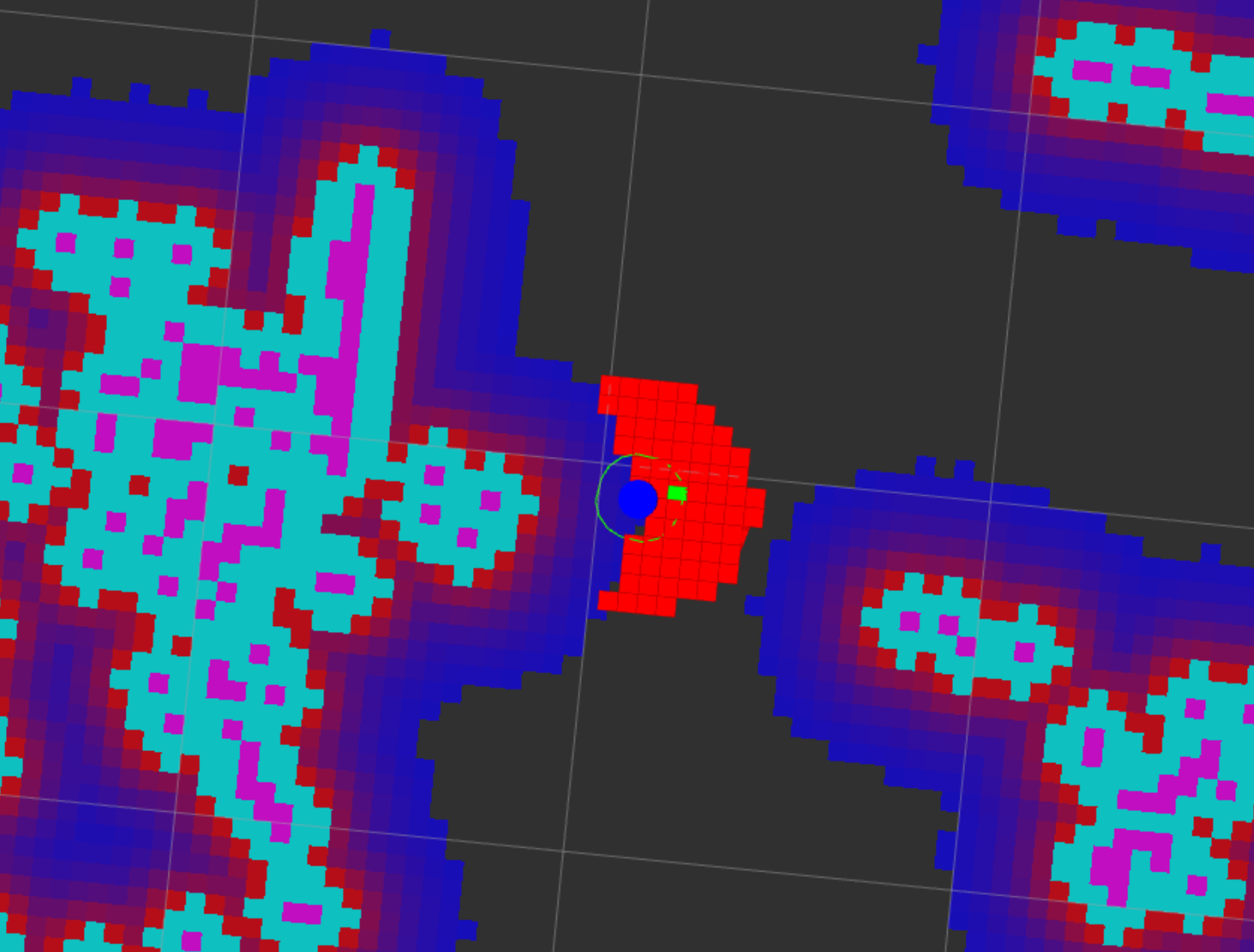
大弧度转向的问题#
大弧度的转向总是会撞到墙的边角,一开始以为是控制器的参数问题,后来发现是点云分析的问题。墙的边角处没有被分析成障碍物,被导航忽略了。
当然和参数也有一定的关系,建议是调参的时候自习阅读文档!!!做好笔记!!!
还需要解决的问题#
📅2024.02.02 小陀螺和云台旋转的问题#
什么时候要开启小陀螺?小陀螺开起来以后,云台的朝向就是前向,那么就是说走路的时候云台不能转?
获取云台角度的方式?话题还是tf?
所有的角度都是相对于一个固定的baselink坐标系的?如何旋转这个固定的baselink坐标系?
上坡和下楼梯的时候需要把小陀螺关掉
小陀螺由决策部分控制
tf从自瞄小电脑上获取
因为底盘的角度是可控而不可知的,所以虚拟一个chassis_link坐标系用于执行旋转,所有导航发出的命令都是相对于chassis_link坐标系的。此外,让电控还是用随动模式(也就是速度相对于云台)来控制底盘的角度,将相对于chassis_link的速度转换到yaw_link下再发出(因为我也说不清楚应该怎么让电控解算,所以就自己解算到云台吧)
因为电控代码会让小陀螺停下时底盘归回0度,所以调整底盘的角度还是可以实现的
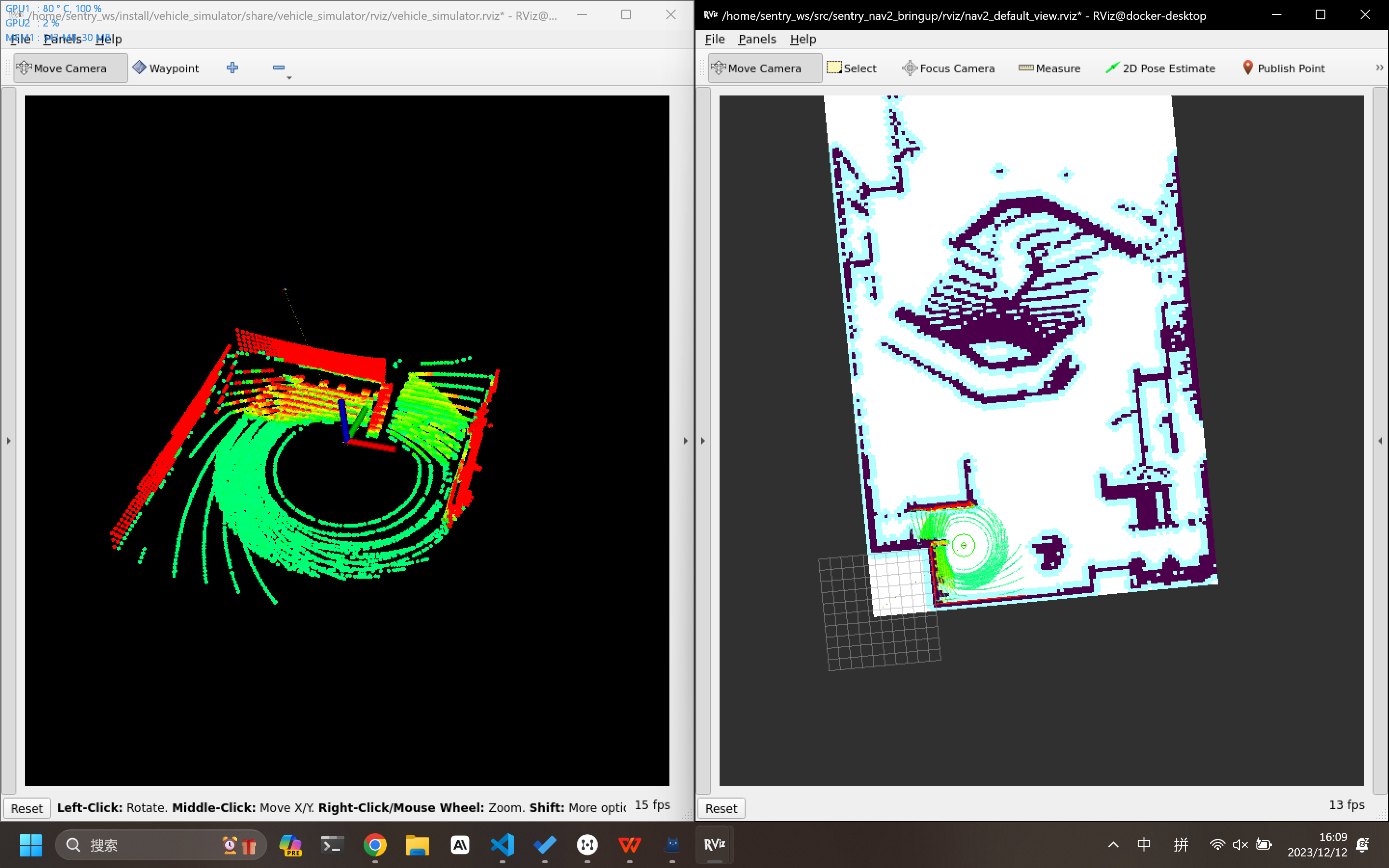
对比一下Nav2和Navigation_development_environment两个导航框架#
Nav2#
稳定、工程化,给决策提供了很多便利
框架庞大,难以分离使用
2d地图方便编辑
FarPlanner 的致命缺点#
地图分辨率不够高,高了搜索速度又太慢
地图不好编辑
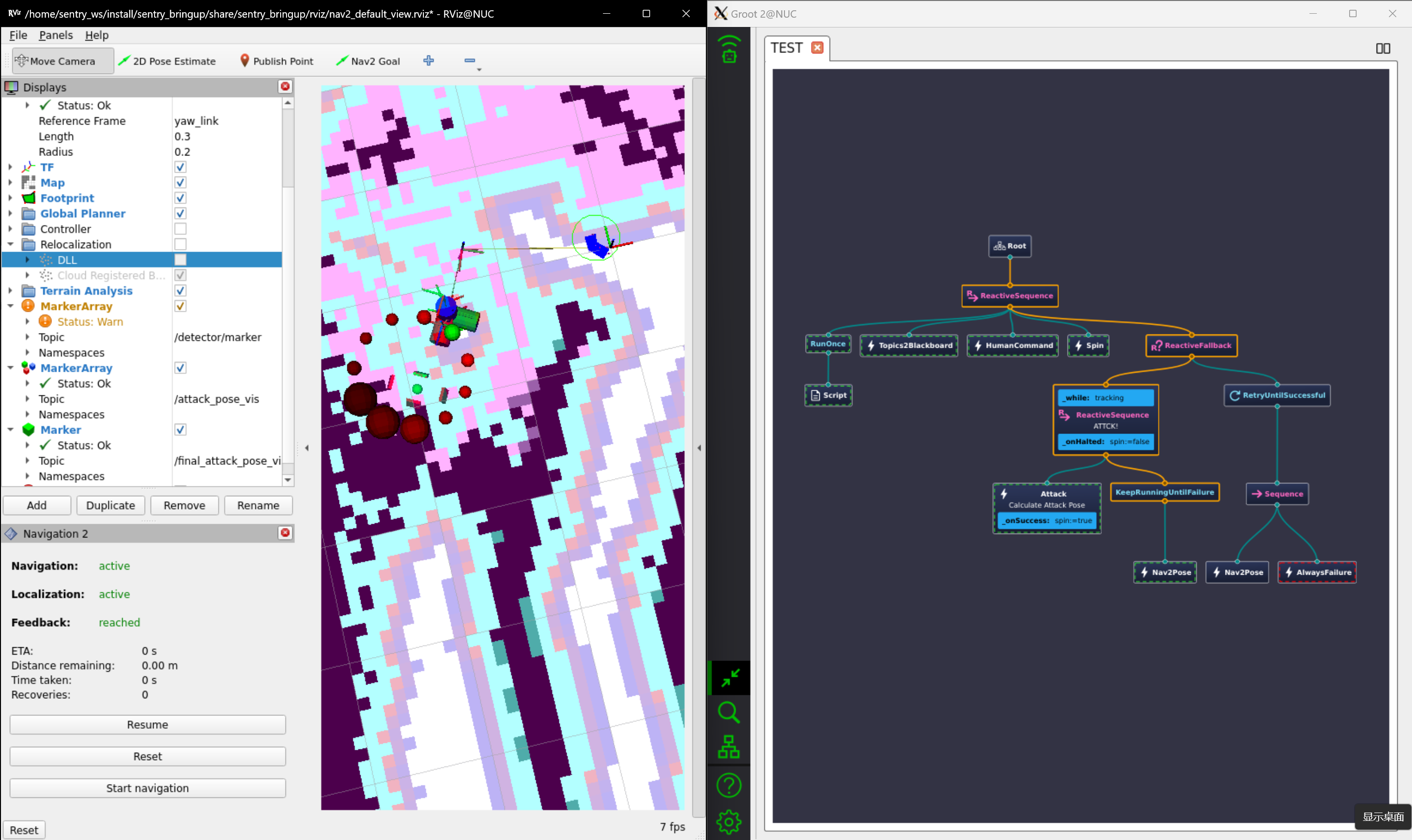
接入自瞄#
注意以下几个问题:
自瞄消息的类型,Publisher和Subscriber要用同样的Qos,否则收不到消息。注意看termial的报错
自瞄最好能改一下消息发送的方式,/tracker/target最好是可以一直发送,没有目标的时候将tracking设置为false,有目标的时候将tracking设置为true。这样可以避免决策上的一些问题
导航自瞄共同运行的效果
雷达全向感知#
2024.02.07 稍微探索了一下,感觉还是有点难度。可以考虑实现。
2024.02.15 发现了做雷达全向感知的方法,在数据集上测试了,感觉可以
2024.02.22 寄 mid360上效果不好
写文档和教程#
📅2024.02.05-06 launch文件说明、包说明
📅2024.02.07 更新中期的赛季规划
📅2024.02.09 行为树设计思想、教程
2024.02.09-02.11 优化和重构代码#
尽量换成进程内通信,在一些部分用上zero-copy,装进containter里运行,这一步还是在所有算法和调参都完成后再做,因为装进containner里以后不好分开调试
写教程文档
想用server-client的方式重构决策的代码,但是感觉有点复杂且没必要🙃
各种试验和探索#
2024.02.04-06 试验了一下Cartographer Pure Localization,回学校以后在实车上测试一下效果如何
2024.02.14 还打算试一下基于NDT的定位和重定位算法 rsasaki0109/lidar_localization_ros2 rsasaki0109/lidarslam_ros2
2024.02.17 又打算试一下SCA-IA之类的点云配准重定位方法
2024.02.18 SCA-IA+gicp 甚至不需要提供初始位姿啊惊了,也不用IMU,就是说不受高速运动的影响啊,但是点云信息不足的时候是不是会寄掉🤔稍后了解下原理
2024.02.16-17 研究了一下其他学校的哨兵方案和技术报告,汇总一下然后写个文档把
2024.02.18 学了一下ROS的executor,callback group和Qos,写了文档
2024.02.18 foxglove真香,这不rviz嘎嘎顺滑 2024.02.23 foxglove延迟好大 :(
定位的优化#
问题的发现#
一开始以为是剧烈震动导致的定位跑飞,后来在测试算法的时候拿雷达在原地疯狂旋转也没事,所以估计跑飞是因为雷达以很快的速度到达了一个新的位置,新的lidar scan和之前的lidar scan之间的匹配关系不好,导致了定位跑飞。
对比横评了一下各个算法,发现了各自的优劣:
LIO-SAM: 虽然有人说gtsam这个库有问题,但是我造诣不够深,看不出来问题在哪。我个人认为对于建图这种问题,还是选择一个有后端的系统会更好,这样可以提高建图的精度,毕竟滤波器还是更容易drift的。
另外这个框架好像对imu的要求比较高,原文要求的是9轴imu。官方的ROS1版本在6轴imu上会报错,ROS2版本在6轴imu上不报错但是效果差点。
FAST-LIO: 有drift的问题,在point-lio的测试视频中,对于超高速运动的表现不如point-lio,但感觉也不差,至少没有差到随便抖一抖就跑飞的地步。当然这也因此让我去研究了一下imu和lidar-imu的标定。
Point-Lio:在官方的测试视频中效果是很震撼的,但是实际测下来感觉效果并没有那么好。它的建图精度并不高,特别是在剧烈震动的时候,很有可能是逐点更新框架导致的。这个框架虽然可是输出高频率的里程计数据,但是在计算雷达点和已有地图的匹配的时候,不如FAST-LIO把多个点合并成一个scan来的好(一个scan的点云信息更丰富,更容易得到好的匹配)。还有一个问题就是它处理饱和imu数据的方式,虽然还没有完全看懂,但是可以看出,在imu数据饱和的时候,它会直接把imu数据丢掉,在可视化里程计的时候就会看到车体急停的时候,定位还有一个惯性一样的滞后,一旦发生了这种情况,定位就会发生大幅度的drift。
当然,Point-Lio发生这些情况也是因为配置文件没有写好,imu的饱和值没有写好,所以它才会直接把imu数据丢掉。但是这也说明了,这个框架的鲁棒性不够好,对于一些特殊情况的处理不够好。至少我懒得花很多时间去填写一个十分严密的配置文件。
综上,
定位精度(理论判断,LIO-SAM有回环):LIO-SAM > FAST-LIO (Point-Lio不好判断,很难说如果配置文件写好了会不会比FAST-LIO好)
建图精度(根据跑同一个bag建出来的图噪点多不多来直观的判断):LIO-SAM > FAST-LIO > Point-Lio
鲁棒性:LIO-SAM > FAST-LIO
Community的解决方案#
LIO-SAM_MID360_ROS2: 一直报large velocity的错误
FAST_LIO_SAM:效果很好,打算用这个来做建图。这个还有gps的支持,说不定可以和雷达站结合一下
LIO-SAM-MID360:效果也很好
一点想法#
被定位困了好久哇,试了很多SLAM方法,很多重定位方法。要么是精度不够,要么是鲁棒性不够好,要么是太耗算力。
也是参考了很多的方案
大公司的有Google的cartographer的pure localization,百度的apollo的Multi Sensor Fusion,这个框架太大了,不好分离使用,但为了学习还是看了一下,也是给自己的定位优化提供了一些思路。
社区的方案看了FAST_LIO_SAM,感觉很不错的。
最后就是论文了,这段时间没事干刚好沉淀沉淀,静下心来读论文,加深理解了以后发现,到处找方案不如做点适配自己需求的优化。
优化方案#
原先的方案是一个SLAM算法+一个重定位算法,两个算法是分离的。
想来这样其实比较浪费,明明在做差不多的事情却不相互利用。
而且一直在想,scan-to-map这么强的约束,怎么会导致定位跑飞呢?
还有就是回环检测,还有很多可以优化的地方啊,现在的回环指的是回到了和之前几乎一样的位置才有办法检测到。站在人的角度看,我非得站到和原来一模一样的位置才能知道我回到了原来的位置吗?不是的,我只要看到了一些熟悉的东西,我就知道我回到了原来的位置。semantic loop closure? 可能是算力上的限制把,这个方面的研究不多,但是我觉得这个方面的研究是很有意义的。
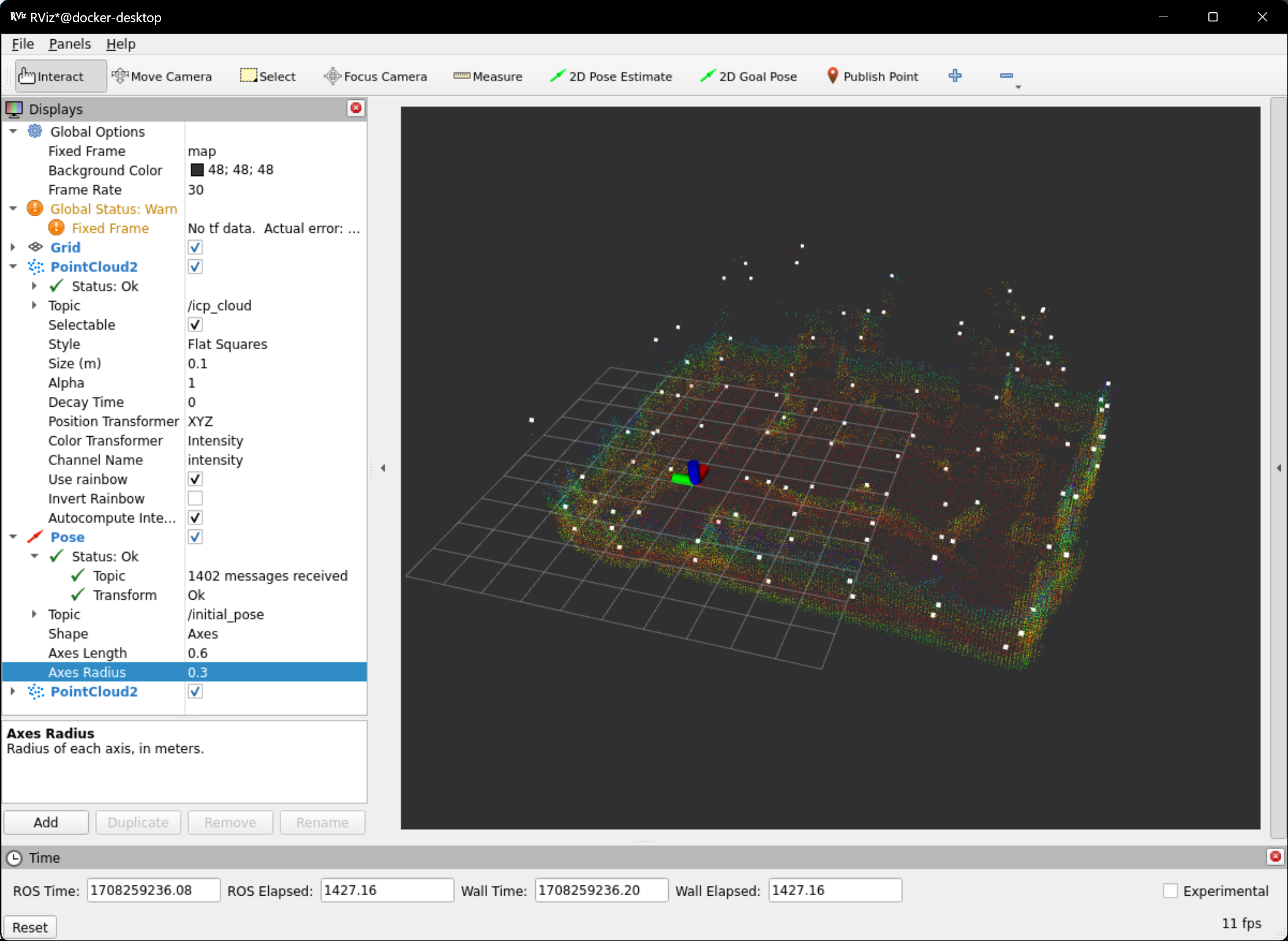
针对我们这个比赛的需求,机器人是在一个已知的环境里运动,所以prior map这么强的约束怎么能不用呢?于是我对FAST-LIO动刀了,原先的SLAM模式是匹配scan到map,然后增量式更新map。而既然我们有全局地图了,那么就可以做scan到prior map的匹配,这样重定位模块就可以去掉了。(去吧!占用率100%的ICP!)
2024.04.07 算法通过测试,导航总占用率nuc12 20%左右
2024.04.07 复苏SCA-IA GICP,实现了不需要给初始点的全局重定位,可以用来做fast lio跑飞恢复。就是重定位要花的时间比较长,精度比较低。之后再优化一下。
2024.04.07试了别的学校的点云分割方法,linefit segmentation,占用率很小,效果也不错
调参记录#
被MPPI调参折磨了很久了,问题就是平滑性和跟踪性得不到很好的平衡,默认的参数也不敢做大的改动。最后在仿真里试了一下,又参考了一下nav2官方给出的使用mppi进行轨迹跟踪的视频,发现mpc类的算法可能就是普遍存在这样的问题,在有大弧度的拐弯的时候,平滑性和跟踪性难以兼得。本来觉得路径规划算法对于最后控制的影响不大的,现在发现还是需要考虑,如果路径规划时就已经规划处一条平滑的、远离障碍物的路径,那么跟踪的性能也会更好。虽然说A或者Hybrid A在理论上不是最短路,也有一些对于全向运动模型不必要的限制,但是它更平滑,更远离障碍物,所以在实际应用中可能会更好。
上不去坡居然是因为功率不够,车本身就走不直!
调参的时候先粗调后精调,粗调可以按数量级来,在参数后面加0,来获得一个这个参数作用的直观感受,后面就会更好调整。
终究还是文档读少了,把inflation radius设置到一个较大值,把地图弄成有点势力场的样子才是正确的做法。
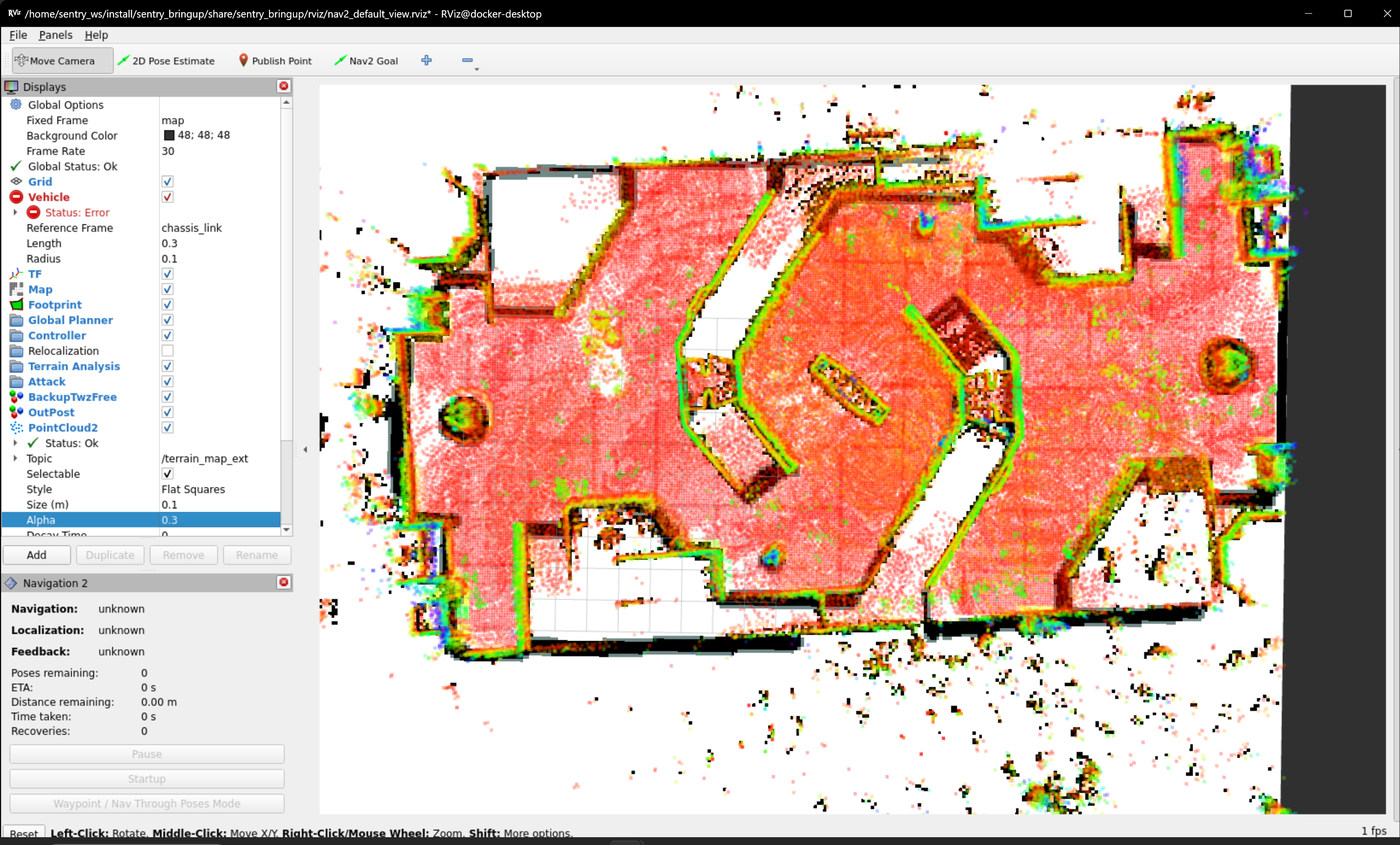
纪念一下在赛场上建的图
非常好的攻击选点算法
赛后又开发了一个具有底盘对齐功能的平滑器。赛场上才发现底盘对齐是一个多么重要的功能,果然赛场上想要表现得好就得一个细节一个细节地优化。
其实也没写什么,就是可以根据地图的颜色来调整车的朝向,黑色到白色的0-255的值对应-180到180度的角度,把这些角度导入到平滑器输出的路径的方向上,然后MPC就可以根据这个方向来调整车的朝向了。
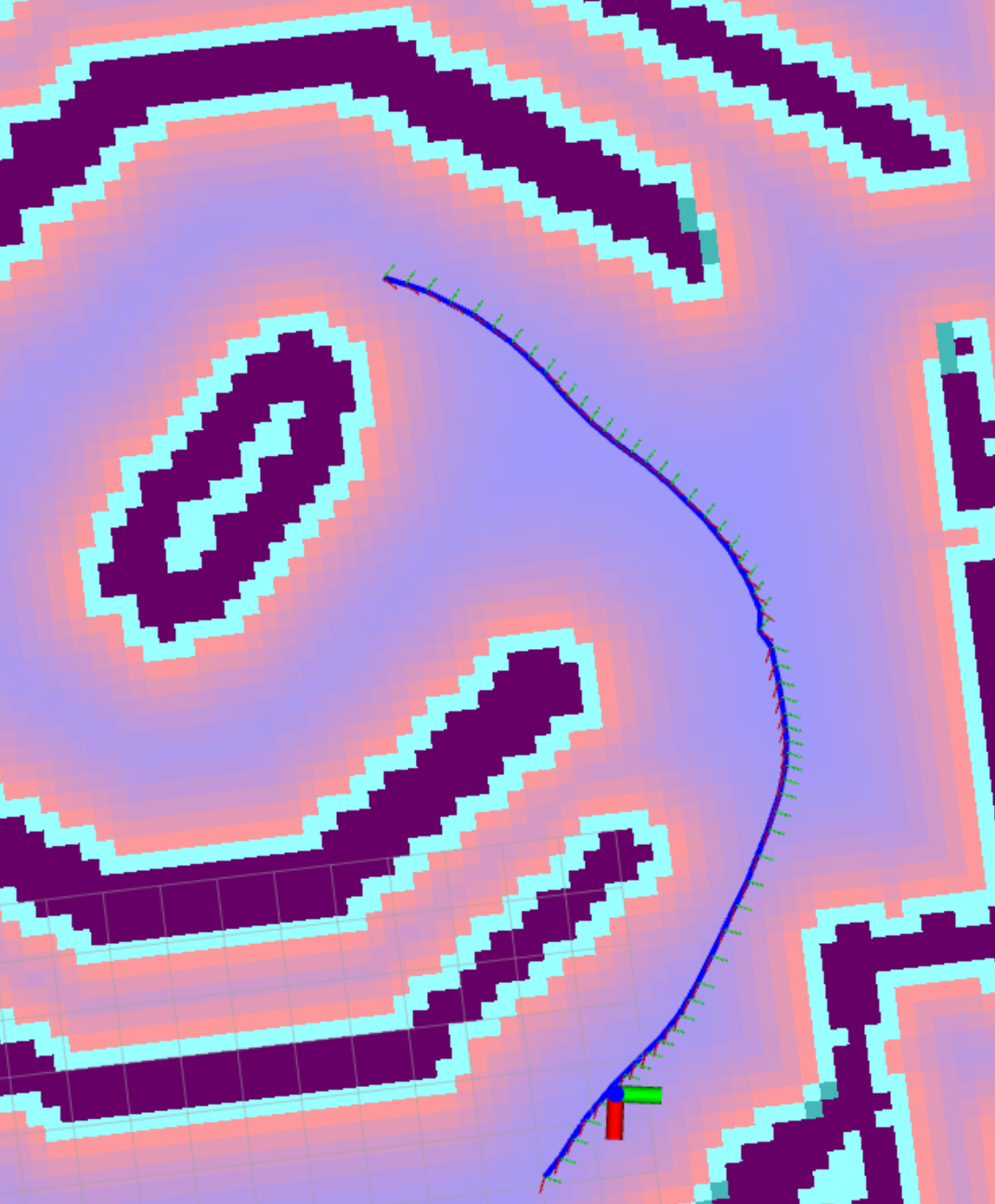
标明了方向的地图就长这样

我哨!
